5.4 Benchmarks
Benchmarks are used to verify that a solver solves the problem correctly, i.e., to verify correctness of a
code.
Over the past decades, the geodynamics community has come up with a large number of benchmarks. Depending on
the goals of their original inventors, they describe stationary problems in which only the solution of the flow problem
is of interest (but the flow may be compressible or incompressible, with constant or variable viscosity, etc), or they
may actually model time-dependent processes. Some of them have solutions that are analytically known and can be
compared with, while for others, there are only sets of numbers that are approximately known. We have
implemented a number of them in ASPECT to convince ourselves (and our users) that ASPECT
indeed works as intended and advertised. Some of these benchmarks are discussed below. Numerical
results for several of these benchmarks are also presented in [KHB12] in much more detail than shown
here.
5.4.1 Running benchmarks that require code
Some of the benchmarks require plugins like custom material models, boundary conditions, or postprocessors. To
not pollute ASPECT with all these purpose-built plugins, they are kept separate from the more generic plugins in
the normal source tree. Instead, the benchmarks have all the necessary code in .cc files in the benchmark
directories. Those are then compiled into a shared library that will be used by ASPECT if it is referenced in a
.prm file. Let’s take the SolCx benchmark as an example (see Section 5.4.4). The directory contains:
- solcx.cc – the code file containing a material model “SolCxMaterial” and a postprocessor
“SolCxPostprocessor”,
- solcx.prm – the parameter file referencing these plugins,
- CMakeLists.txt – a cmake configuration that allows you to compile solcx.cc.
To run this benchmark you need to follow the general outline of steps discussed in Section 6.2. For the current case,
this amounts to the following:
- Move into the directory of that particular benchmark:
$ cd benchmarks/solcx
- Set up the project:
$ cmake .
By default, cmake will look for the ASPECT binary and other information in a
number of directories relative to the current one. If it is unable to pick up where
ASPECT was built and installed, you can specify this directory explicitly this using -D
Aspect_DIR=...
as an additional flag to cmake, where
...
is the path to the build directory.
- Build the library:
$ make
This will generate the file libsolcx.so.
Finally, you can run ASPECT with solcx.prm:
$ ../../aspect solcx.prm
where again you may have to use the appropriate path to get to the ASPECT executable. You will need to run
ASPECT from the current directory because solcx.prm refers to the plugin as ./libsolcx.so, i.e., in the current
directory.
5.4.2 Onset of convection benchmark
This section was contributed by Max Rudolph, based on a course assignment for “Geodynamic Modeling” at Portland
State University.
Here we use ASPECT to numerically reproduce the results of a linear stability analysis for the onset of
convection in a fluid layer heated from below. This exercise was assigned to students at Portland State University as
a first step towards setting up a nominally Earth-like mantle convection model. Hence, representative
length scales and transport properties for Earth are used. This cookbook consists of a jupyter notebook
(benchmarks/onset-of-convection/onset-of-convection.ipynb) that is used to run ASPECT and analyze the
results of several calculations. To use this code, you must compile ASPECT and give the path to the executable in
the notebook as aspect_bin.
The linear stability analysis for the onset of convection appears in Turcotte and Schubert [TS14]
(section 6.19). The linear stability analysis assumes the Boussinesq approximation and makes
predictions for the growth rate (vertical velocity) of instabilities and the critical Rayleigh number
above which
convection will occur.
depends only on the dimensionless wavelength of the perturbation, which is assumed to be equal to the width of the domain. The
domain has height
and width
and the perturbation is described by
where is
the amplitude of the perturbation. Note that because we place the bottom boundary of the domain at
and the
top at ,
the perturbation vanishes at the top and bottom boundaries. This departs slightly
from the setup in [TS14], where the top and bottom boundaries of the domain are at
. The analytic expression for
the critical Rayleigh number,
is given in Turcotte and Schubert [TS14] equation (6.319):
The linear stability analysis also makes a prediction for the dimensionless growth rate of the instability
(Turcotte and Schubert [TS14], equation (6.315)). The maximum vertical velocity is given by
where
and
We use bisection to determine
for specific choices of the domain geometry, keeping the depth
constant and varying
the domain width .
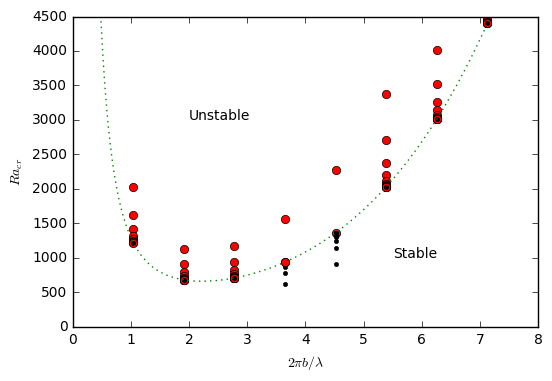
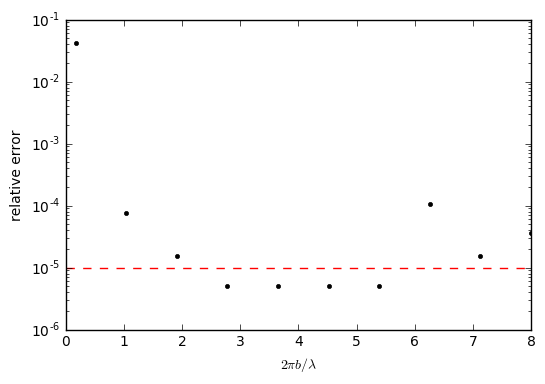
If the vertical velocity increases from the first to the second timetsp, the system is unstable to convection. Otherwise, it
is stable and convection will not occur. Each calculation is terminated after the second timestep. Fig. 64 shows the
numerically-determined threshold for the onset of convection, which can be compared directly with the theoretical
prediction (green curve) and Fig. 6.39 of [TS14]. The relative error between the numerically-determined value of
and the
analytic solution are shown in the right panel of Fig. 64.
5.4.3 The van Keken thermochemical composition benchmark
This section is a co-production of Cedric Thieulot, Juliane Dannberg, Timo Heister and Wolfgang Bangerth with an
extension to this benchmark provided by the Virginia Tech Department of Geosciences class “Geodynamics and
ASPECT” co-taught by Scott King and D. Sarah Stamps.
One of the most widely used benchmarks for mantle convection codes is the
isoviscous Rayleigh-Taylor case (“case 1a”) published by van Keken et al. in
[vKKS97].
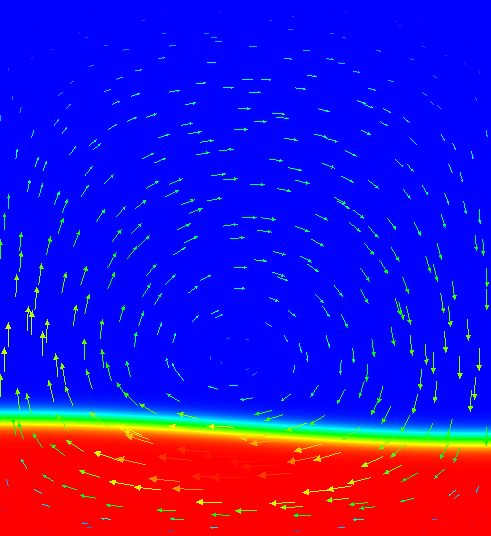
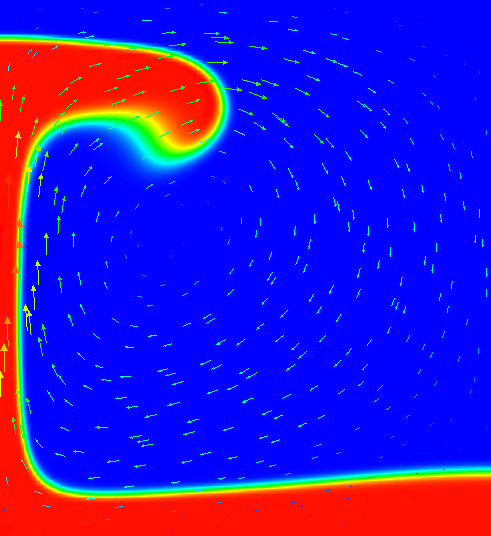
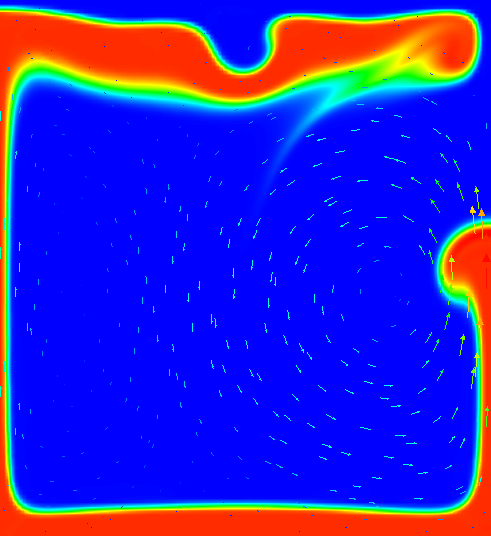
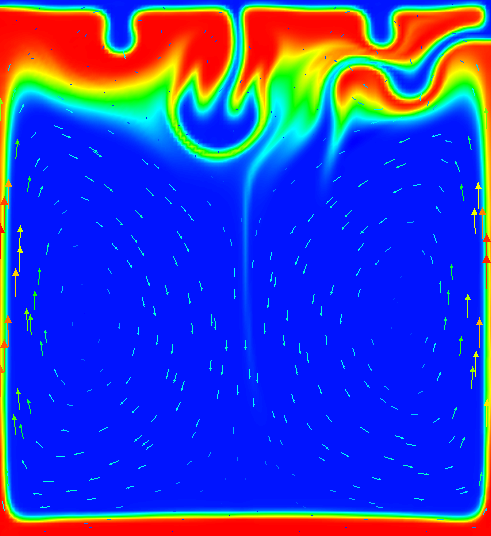
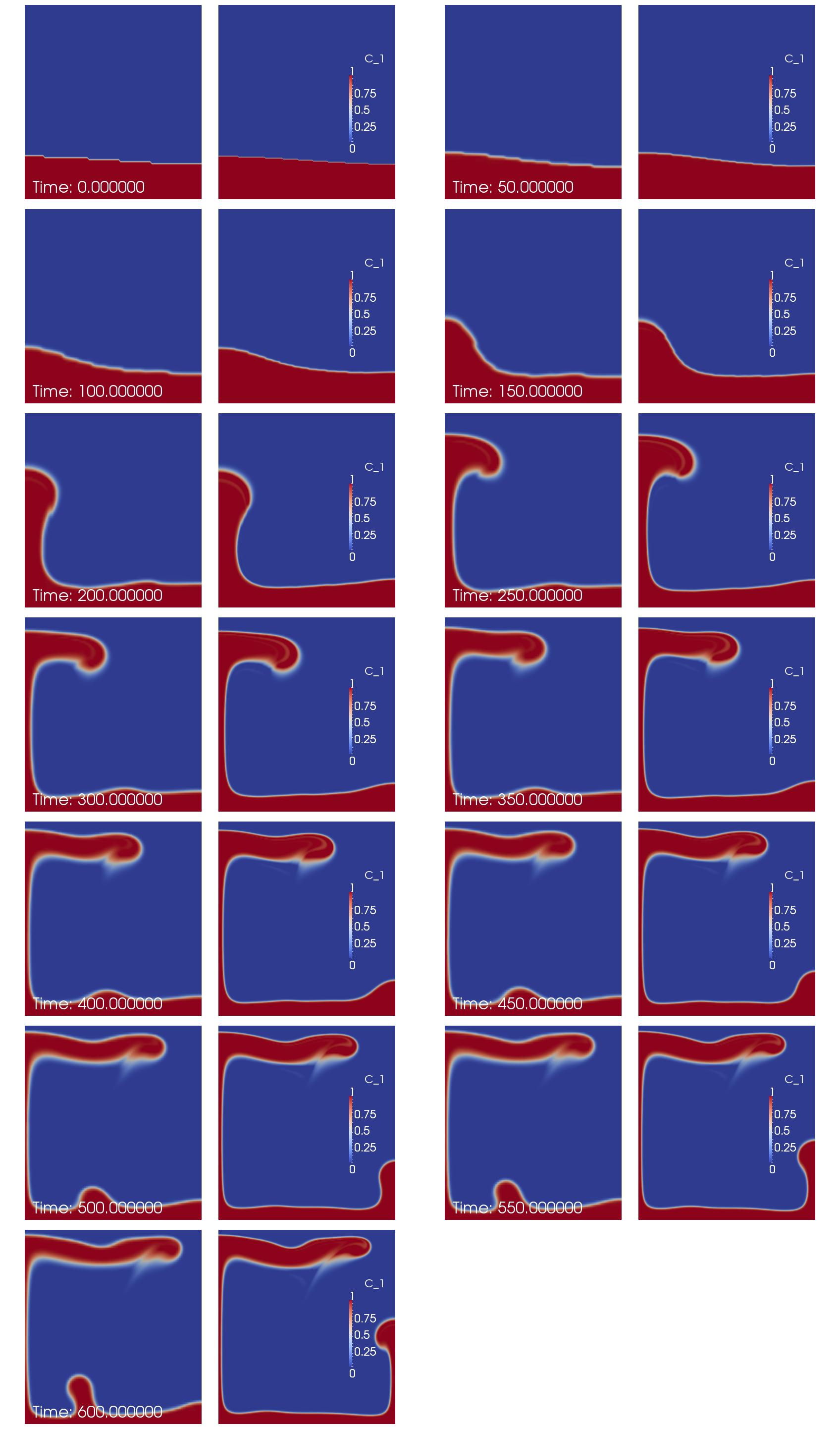
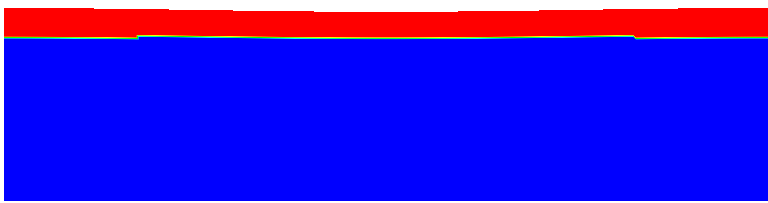
The benchmark considers a 2d situation where a lighter fluid underlies a heavier one with a non-horizontal interface
between the two of them. This unstable layering causes the lighter fluid to start rising at the point where the
interface is highest. Fig. 65 shows a time series of images to illustrate this.
Although van Keken’s paper title suggests that the paper is really about thermochemical convection, the part we
look here can equally be considered as thermal or chemical convection: all that is necessary is that we describe the
fluid’s density somehow. We can do that by using an inhomogeneous initial temperature field, or an inhomogeneous
initial composition field. We will use the input file in cookbooks/van-_keken-_discontinuous.prm as input,
the central piece of which is as follows (go to the actual input file to see the remainder of the input
parameters):
The first part of this selects the simple material model and sets the thermal expansion to zero (resulting in a
density that does not depend on the temperature, making the temperature a passively advected field) and instead
makes the density depend on the first compositional field. The second section prescribes that the first compositional
field’s initial conditions are 0 above a line describes by a cosine and 1 below it. Because the dependence of
the density on the compositional field is negative, this means that a lighter fluid underlies a heavier
one.
The dynamics of the resulting flow have already been shown in Fig. 65. The measure commonly considered in
papers comparing different methods is the root mean square of the velocity, which we can get using the following
block in the input file (the actual input file also enables other postprocessors):
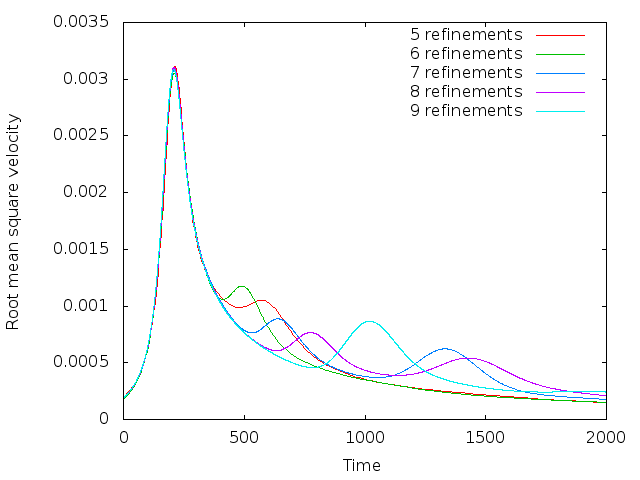
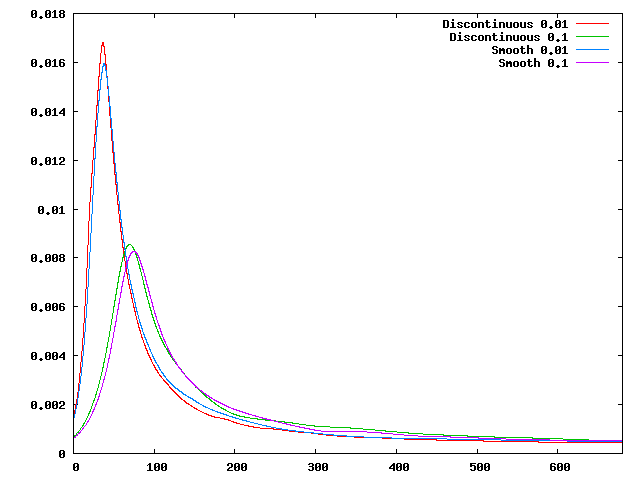
Using this, we can plot the evolution of the fluid’s average velocity over time, as shown in the left panel of Fig. 66.
Looking at this graph, we find that both the timing and the height of the first peak is already well converged on a
simple
mesh (5 global refinements) and is very consistent (to better than 1% accuracy) with the results in the van Keken
paper.
That said, it is startling that the second peak does not appear to converge despite the fact that the various codes compared
in [vKKS97]
show good agreement in this comparison. Tracking down the cause for this proved to be a lesson in benchmark
design; in hindsight, it may also explain why van Keken et al. stated presciently in their abstract that
“…good agreement is found for the initial rise of the unstable lower layer; however, the timing and
location of the later smaller-scale instabilities may differ between methods.” To understand what is
happening here, note that the first peak in these plots corresponds to the plume that rises along the left
edge of the domain and whose evolution is primarily determined by the large-scale shape of the initial
interface (i.e., the cosine used to describe the initial conditions in the input file). This is a first order
deterministic effect, and is obviously resolved already on the coarsest mesh shown used. The second peak
corresponds to the plume that rises along the right edge, and its origin along the interface is much harder
to trace – its position and the timing when it starts to rise is certainly not obvious from the initial
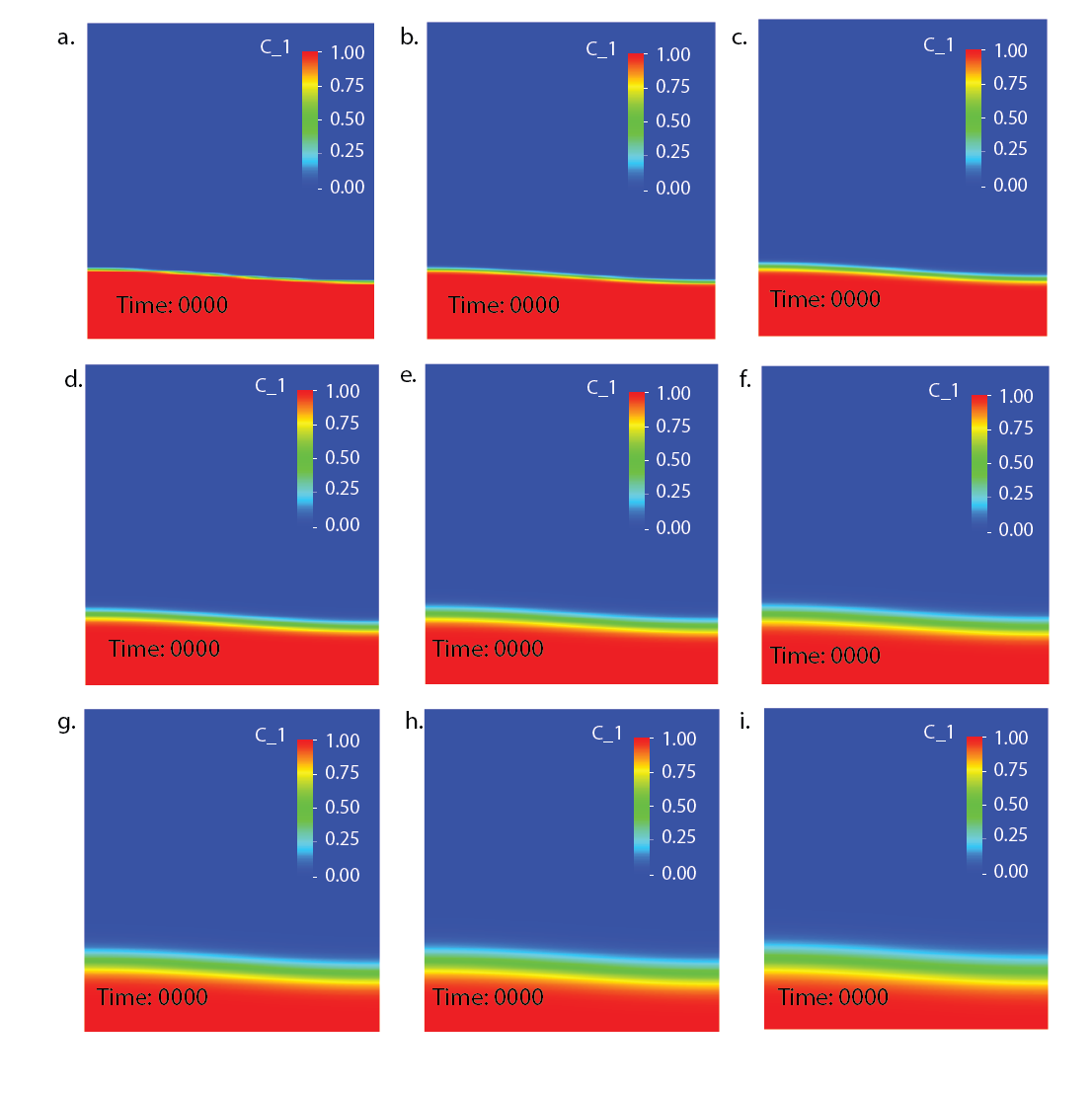
location of the interface. Now recall that we are using a finite element field using continuous shape
functions for the composition that determines the density differences that drive the flow. But this
interface is neither aligned with the mesh, nor can a discontinuous function be represented by continuous
shape functions to begin with. In other words, we may input the initial conditions as a discontinuous
functions of zero and one in the parameter file, but the initial conditions used in the program are in fact
different: they are the interpolated values of this discontinuous function on a finite element mesh. This is
shown in Fig. 67. It is obvious that these initial conditions agree on the large scale (the determinant
of the first plume), but not in the steps that may (and do, in fact) determine when and where the
second plume will rise. The evolution of the resulting compositional field is shown in Fig. 68 and it is
obvious that the second, smaller plume starts to rise from a completely different location – no wonder
the second peak in the root mean square velocity plot is in a different location and with different
height!
The conclusion one can draw from this is that if the outcome of a computational experiment depends so critically
on very small details like the steps of an initial condition, then it’s probably not a particularly good measure
to look at in a benchmark. That said, the benchmark is what it is, and so we should try to come
up with ways to look at the benchmark in a way that allows us to reproduce what van Keken et al.
had agreed upon. To this end, note that the codes compared in that paper use all sorts of different
methods, and one can certainly agree on the fact that these methods are not identical on small length
scales. One approach to make the setup more mesh-independent is to replace the original discontinuous
initial condition with a smoothed out version; of course, we can still not represent it exactly on any
given mesh, but we can at least get closer to it than for discontinuous variables. Consequently, let us
use the following initial conditions instead (see also the file cookbooks/van-_keken-_smooth.prm):
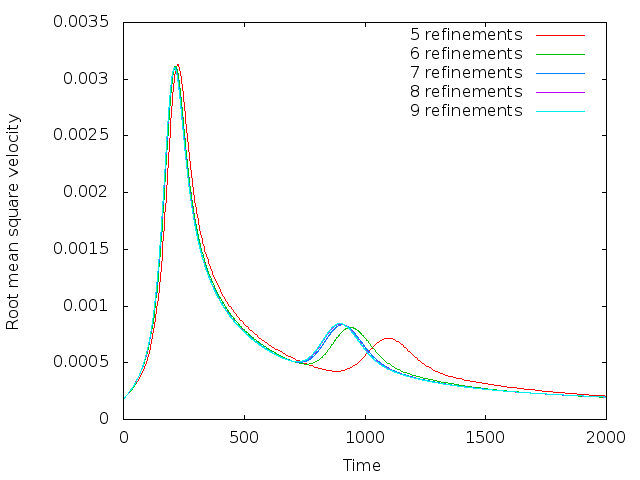
This replaces the discontinuous initial conditions with a smoothed out version with a half width of around 0.01.
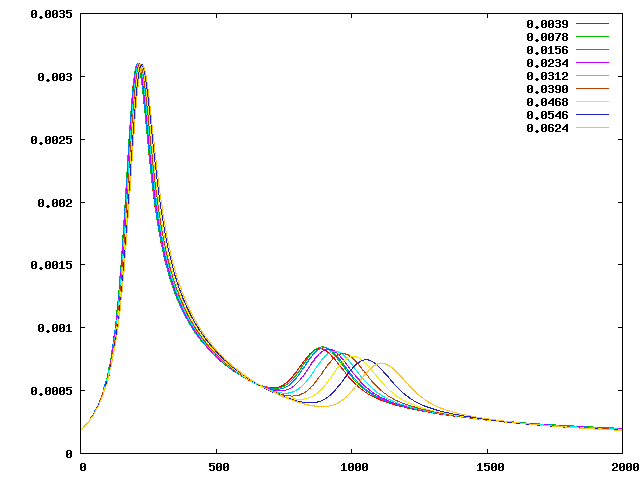
Using this, the root mean square plot now looks as shown in the right panel of Fig. 66. Here, the second peak also
converges quickly, as hoped for.
The exact location and height of the two peaks is in good agreement with those given in the paper by van Keken
et al., but not exactly where desired (the error is within a couple of per cent for the first peak, and probably better
for the second, for both the timing and height of the peaks). This has to do with the fact that they depend on the
exact size of the smoothing parameter (the division by 0.02 in the formula for the smoothed initial condition).
However, for more exact results, one can choose this half width parameter proportional to the mesh size and
thereby get more accurate results. The point of the section was to demonstrate the reason for the lack of
convergence.
In this section we extend the van Keken cookbook following up the work previously completed by Cedric
Thieulot, Juliane Dannberg, Timo Heister and Wolfgang Bangerth. This section contributed by Grant Euen,
Tahiry Rajaonarison, and Shangxin Liu as part of the Geodynamics and ASPECT class at Virginia
Tech.
As already mentioned above, using a half width parameter proportional to the mesh size allows for more
accurate results. We test the effect of the half width size of the smoothed discontinuity by changing the division by
0.02, the smoothing parameter, in the formula for the smoothed initial conditions into values proportional to the
mesh size. We use 7 global refinements because the root mean square velocity converges at greater resolution while
keeping average runtime around 5 to 25 minutes. These runtimes were produced by the BlueRidge cluster of the
Advanced Research Computing (ARC) program at Virginia Tech. BlueRidge is a 408-node Cray CS-300 cluster;
each node outfitted with two octa-core Intel Sandy Bridge CPUs and 64 GB of memory. A chart of average runtimes
for 5 through 10 global refinements on one node can be seen in Table 5. For 7 global refinements
(128128
mesh size), the size of the mesh is 0.0078 corresponding to a half width parameter of 0.0039. The smooth model
allows for much better convergence of the secondary plumes, although they are still more scattered than the primary
plumes.
|
|
|
|
|
|
| Global | Number of Processors |
| Refinements | 4 | 8 | 12 | 16 |
|
|
|
|
|
|
| 5 | 28.1 seconds | 19.8 seconds | 19.6 seconds | 17.1 seconds |
| 6 | 3.07 minutes | 1.95 minutes | 1.49 minutes | 1.21 minutes |
| 7 | 23.33 minutes | 13.92 minutes | 9.87 minutes | 7.33 minutes |
| 8 | 3.08 hours | 1.83 hours | 1.30 hours | 56.33 minutes |
| 9 | 1.03 days | 15.39 hours | 10.44 hours | 7.53 hours |
| 10 | More than 6 days | More than 6 days | 3.39 days | 2.56 days |
|
|
|
|
|
|
| |
Table 5: Average runtimes for the van Keken Benchmark with smoothed initial conditions. These times are
for the entire computation, a final time step number of 2000. All of these tests were run using ASPECT
version 1.3 in release mode, and used different numbers of processors on one node on the BlueRidge cluster
of ARC at Virginia Tech.
This convergence is due to changing the smoothing parameter, which controls how much of the problem is
smoothed over. As the parameter is increased, the smoothed boundary grows and vice versa. As the smoothed
boundary shrinks it becomes sharper until the original discontinuous behavior is revealed. As it grows, the two
layers eventually become one large, transitioning layer rather than two distinct layers separated by a
boundary. These effects can be seen in Fig. 69. The overall effect is that the secondary rise is at different
times based on these conditions. In general, as the smoothing parameter is decreased, the smoothed
boundary shrinks and the plumes rise more quickly. As it is increased, the boundary grows and the plumes
rise more slowly. This trend can be used to force a more accurate convergence from the secondary
plumes.
The evolution in time of the resulting compositional fields (Fig. 70) shows that the first peak converges
as the smoothed interface decreases. There is a good agreement for the first peak for all smoothing
parameters. As the width of the discontinuity increases, the second peak rises both later and more
slowly.
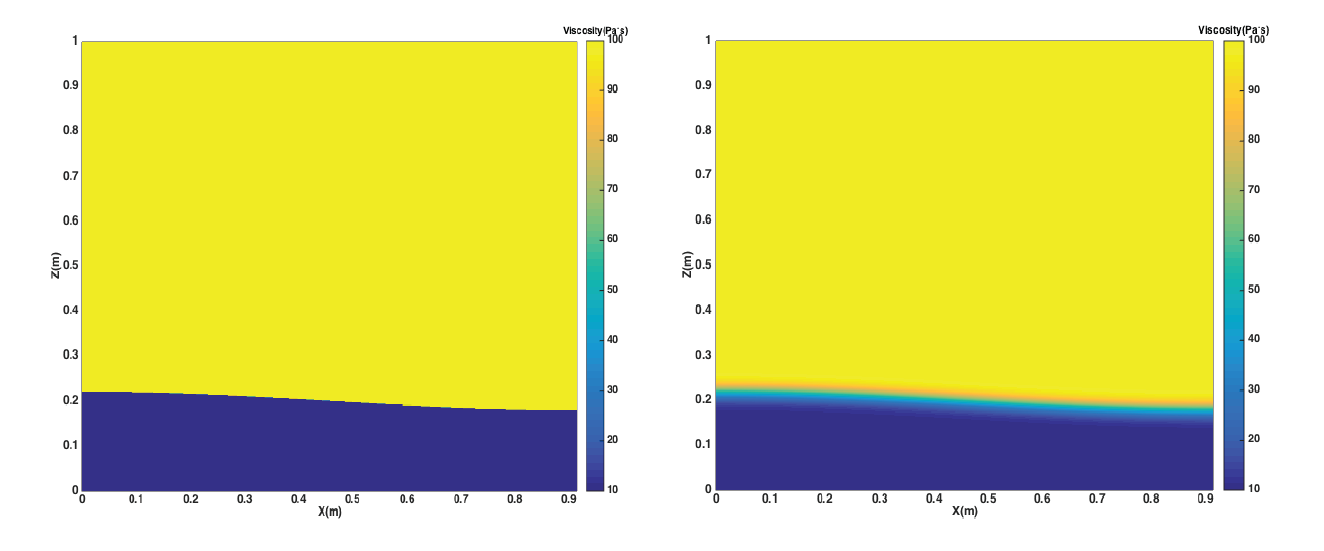
Now let us further add a two-layer viscosity model to the domain. This is done to recreate the two
nonisoviscous Rayleigh-Taylor instability cases (“cases 1b and 1c”) published in van Keken et al. in
[vKKS97].
Let’s assume the viscosity value of the upper heavier layer is
and the viscosity value of the lower
lighter layer is . Based on the initial
constant viscosity value 1 Pa s, we set
the viscosity proportion , meaning the
viscosity of the upper, heavier layer is still 1
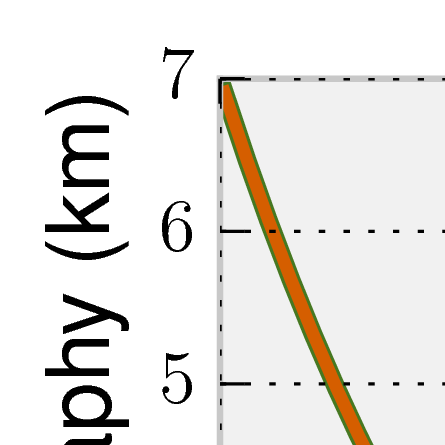
Pa s, but the viscosity of the lower, lighter layer is now either 10 or 1 Pa s, respectively. The viscosity profiles of the
discontinuous and smooth models are shown in Fig. 71.
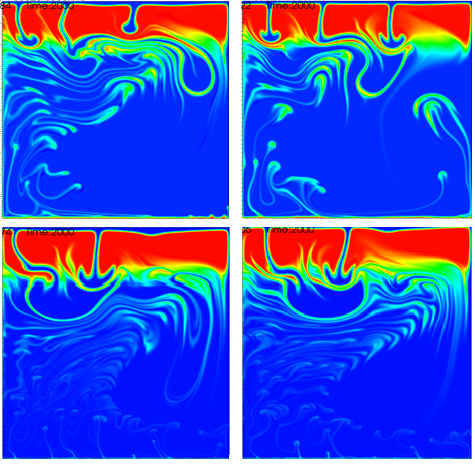
For both benchmark cases, discontinuous and smooth, and both viscosity proportions, 0.1 and 0.01, the results
are shown at the end time step number, 2000, in Fig. 72. This was generated using the original input
parameter file, running the cases with 8 global refinement steps, and also adding the two-layer viscosity
model.
Compared to the results of the constant viscosity throughout the domain, the plumes rise faster when adding the
two-layer viscosity model. Also, the larger the viscosity difference is, the earlier the plumes appear and the faster
their ascent. To further reveal the effect of the two-layer viscosity model, we also plot the evolution of the fluids’
average velocity over time, as shown in Fig. 73.
We can observe that when the two-layer viscosity model is added, there is only one apparent peak for each case.
The first peaks of the 0.01 viscosity contrast tests appear earlier and are larger in magnitude than those of 0.1
viscosity contrast tests. There are no secondary plumes and the whole system tends to reach stability after around
500 time steps.
5.4.4 The SolCx Stokes benchmark
The SolCx benchmark is intended to test the accuracy of the solution to a problem that has a large jump in the
viscosity along a line through the domain. Such situations are common in geophysics: for example,
the viscosity in a cold, subducting slab is much larger than in the surrounding, relatively hot mantle
material.
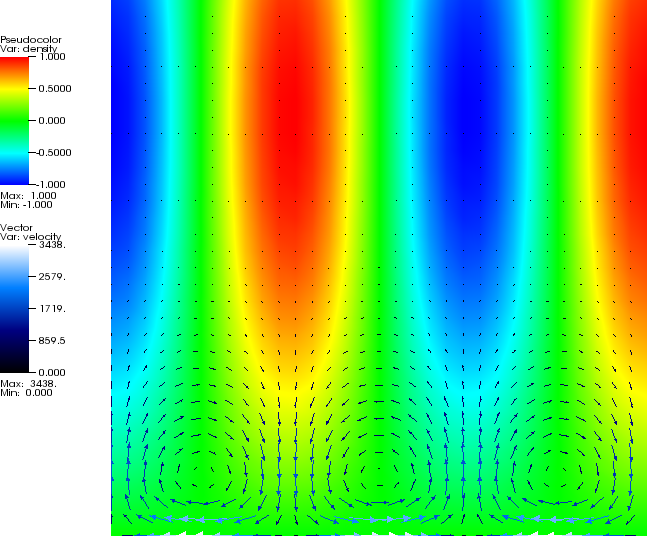
The SolCx benchmark computes the Stokes flow field of a fluid driven by spatial
density variations, subject to a spatially variable viscosity. Specifically, the domain is
, gravity is
and the density
is given by ;
this can be considered a density perturbation to a constant background density. The viscosity is
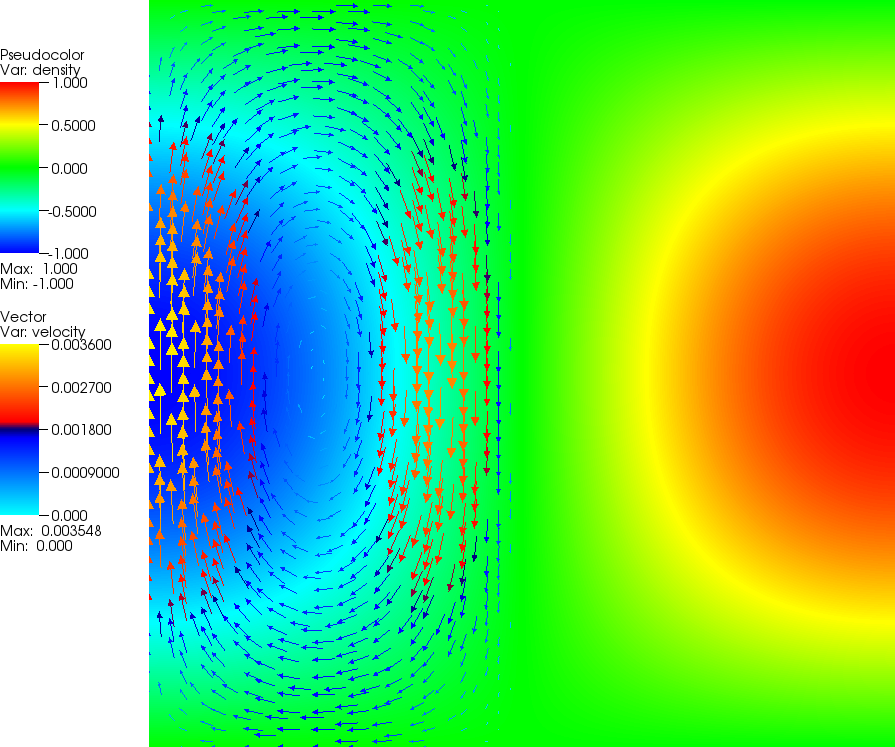
This strongly discontinuous viscosity field yields an almost stagnant flow in the right half of the domain and
consequently a singularity in the pressure along the interface. Boundary conditions are free slip on all of
. The
temperature plays no role in this benchmark. The prescribed density field and the resulting velocity field are shown
in Fig. 74.
The SolCx benchmark was previously used in [DMGT11, Section 4.1.1] (references to earlier uses
of the benchmark are available there) and its analytic solution is given in [Zho96]. ASPECT
contains an implementation of this analytic solution taken from the Underworld package (see
[MQL07]
and http://www.underworldproject.org/, and correcting for the mismatch in sign between the implementation
and the description in [DMGT11]).
To run this benchmark, the following input file will do (see the files in benchmarks/solcx/ to rerun the
benchmark):
Since this is the first cookbook in the benchmarking section, let us go through the different parts of this file in
more detail:
- The material model and the postprocessor
- The first part consists of parameter setting for overall parameters. Specifically, we set the dimension
in which this benchmark runs to two and choose an output directory. Since we are not interested in
a time dependent solution, we set the end time equal to the start time, which results in only a single
time step being computed.
The last parameter of this section, Pressure normalization, is set in such a way that the pressure is
chosen so that its domain average is zero, rather than the pressure along the surface, see Section 2.5.
- The next part of the input file describes the setup of the benchmark. Specifically, we have to say how the
geometry should look like (a box of size )
and what the velocity boundary conditions shall be (tangential flow all around – the box geometry
defines four boundary indicators for the left, right, bottom and top boundaries, see also Section ??).
This is followed by subsections choosing the material model (where we choose a particular model
implemented in ASPECT that describes the spatially variable density and viscosity fields, along with
the size of the viscosity jump) and finally the chosen gravity model (a gravity field that is the constant
vector ,
see Section ??).
- The part that follows this describes the boundary and initial values for the temperature. While we are
not interested in the evolution of the temperature field in this benchmark, we nevertheless need to set
something. The values given here are the minimal set of inputs.
- The second-to-last part sets discretization parameters. Specifically, it determines what kind of Stokes
element to choose (see Section ?? and the extensive discussion in [KHB12]). We do not adaptively
refine the mesh but only do four global refinement steps at the very beginning. This is obviously a
parameter worth playing with.
- The final section on postprocessors determines what to do with the solution once computed. Here,
we do two things: we ask ASPECT to compute the error in the solution using the setup described
in the Duretz et al. paper [DMGT11], and we request that output files for later visualization are
generated and placed in the output directory. The functions that compute the error automatically
query which kind of material model had been chosen, i.e., they can know whether we are solving the
SolCx benchmark or one of the other benchmarks discussed in the following subsections.
Upon running ASPECT with this input file, you will get output of the following kind (obviously with
different timings, and details of the output may also change as development of the code continues):
aspect/cookbooks> ../aspect solcx.prm Number of active cells: 256 (on 5 levels) Number of degrees of freedom: 3,556 (2,178+289+1,089) *** Timestep 0: t=0 years Solving temperature system... 0 iterations. Rebuilding Stokes preconditioner... Solving Stokes system... 30+3 iterations. Postprocessing: Errors u_L1, p_L1, u_L2, p_L2: 1.125997e-06, 2.994143e-03, 1.670009e-06, 9.778441e-03 Writing graphical output: output/solution/solution-00000 +---------------------------------------------+------------+------------+ | Total wallclock time elapsed since start | 1.51s | | | | | | | Section | no. calls | wall time | % of total | +---------------------------------+-----------+------------+------------+ | Assemble Stokes system | 1 | 0.114s | 7.6% | | Assemble temperature system | 1 | 0.284s | 19% | | Build Stokes preconditioner | 1 | 0.0935s | 6.2% | | Build temperature preconditioner| 1 | 0.0043s | 0.29% | | Solve Stokes system | 1 | 0.0717s | 4.8% | | Solve temperature system | 1 | 0.000753s | 0.05% | | Postprocessing | 1 | 0.627s | 42% | | Setup dof systems | 1 | 0.19s | 13% | +---------------------------------+-----------+------------+------------+
One can then visualize the solution in a number of different ways (see Section 4.4), yielding pictures like
those shown in Fig. 74. One can also analyze the error as shown in various different ways, for example
as a function of the mesh refinement level, the element chosen, etc.; we have done so extensively in
[KHB12].
5.4.5 The SolKz Stokes benchmark
The SolKz benchmark is another variation on the same theme as the SolCx benchmark above: it solves a
Stokes problem with a spatially variable viscosity but this time the viscosity is not a discontinuous
function but grows exponentially with the vertical coordinate so that it’s overall variation is again
. The
forcing is again chosen by imposing a spatially variable density variation. For details, refer again to
[DMGT11].
The following input file, only a small variation of the one in the previous section, solves the benchmark (see
benchmarks/solkz/):
The output when running ASPECT on this parameter file looks similar to the one shown for the
SolCx case. The solution when computed with one more level of global refinement is visualized in
Fig. 75.
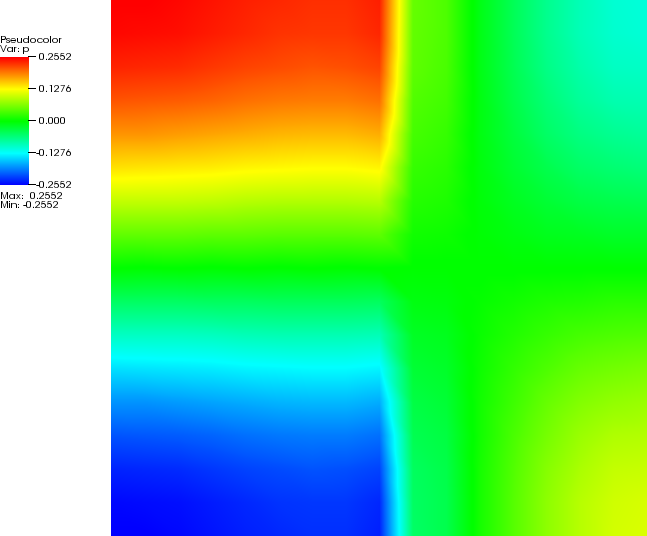
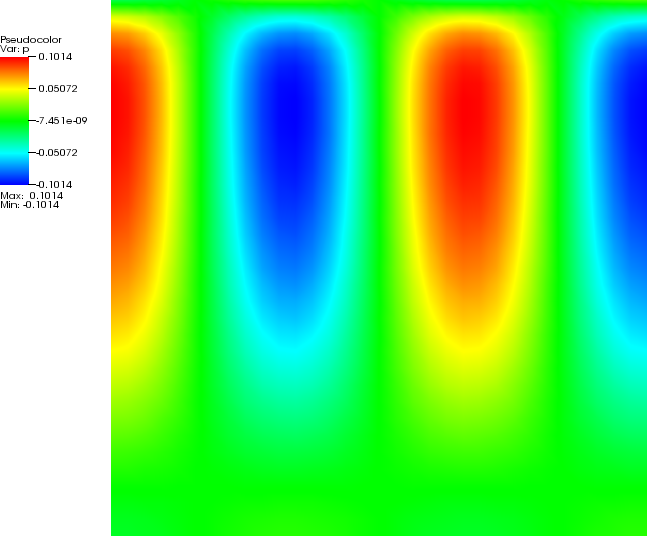
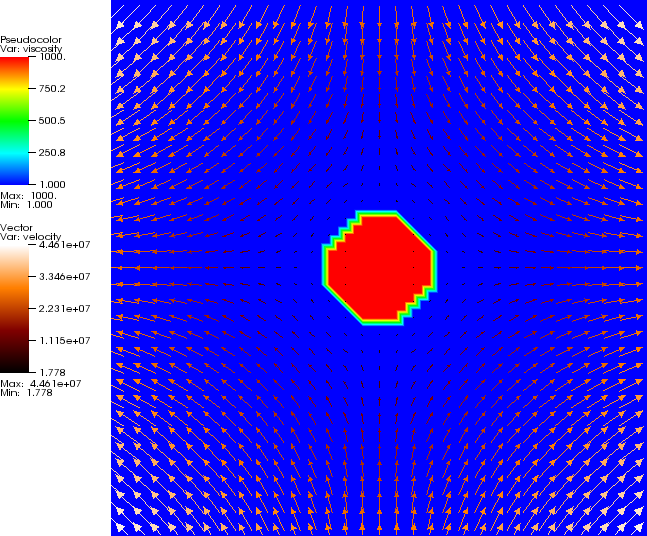
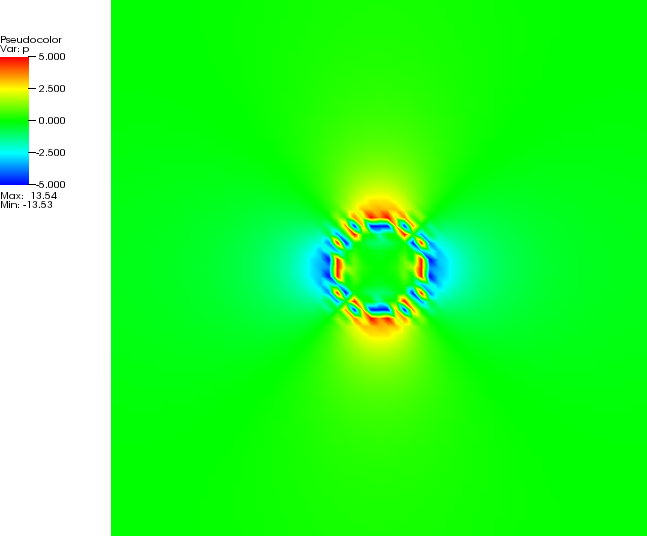
5.4.6 The “inclusion” Stokes benchmark
The “inclusion” benchmark again solves a problem with a discontinuous viscosity, but this time the viscosity is
chosen in such a way that the discontinuity is along a circle. This ensures that, unlike in the SolCx benchmark
discussed above, the discontinuity in the viscosity never aligns to cell boundaries, leading to much larger
difficulties in obtaining an accurate representation of the pressure. Specifically, the almost discontinuous
pressure along this interface leads to oscillations in the numerical solution. This can be seen in the
visualizations shown in Fig. 76. As before, for details we refer to [DMGT11]. The analytic solution against
which we compare is given in [SP03]. An extensive discussion of convergence properties is given in
[KHB12].
The benchmark can be run using the parameter files in benchmarks/inclusion/. The material model, boundary
condition, and postprocessor are defined in benchmarks/inclusion/inclusion.cc. Consequently, this code needs
to be compiled into a shared lib before you can run the tests.
Link to a general section on how you can compile libs for the benchmarks.
Revisit this once we have the machinery in place to choose nonzero boundary conditions in a more elegant
way.
The following prm file isn’t annotated yet. How to annotate if we have a .lib?
5.4.7 The Burstedde variable viscosity benchmark
This section was contributed by Iris van Zelst.
This benchmark is intended to test solvers for variable viscosity Stokes problems. It begins with postulating a smooth
exact polynomial solution to the Stokes equation for a unit cube, first proposed by [DB14] and also described by
[BSA13]:
It is then trivial to verify that the velocity field is divergence-free. The constant
has been added to
the expression of
to ensure that the volume pressure normalization of ASPECT can be used in this benchmark (in other words, to ensure that
the exact pressure has mean value zero and, consequently, can easily be compared with the numerically computed pressure).
Following [BSA13],
the viscosity
is given by the smoothly varying function
|
| (57) |
The maximum of this function is ,
for example at , and the
minimum of this function is
at . The
viscosity ratio
is then given by
|
| (58) |
Hence, by varying
between 1 and 20, a difference of up to 7 orders of magnitude viscosity is obtained.
will be
one of the parameters that can be selected in the input file that accompanies this benchmark.
The corresponding body force of the Stokes equation can then be computed by inserting this solution into the
momentum equation,
|
| (59) |
Using equations (55), (56) and (57) in the momentum equation (59), the following expression for the body force
can be
found:
Assuming ,
the above expression translates into an expression for the gravity vector
. This
expression for the gravity (even though it is completely unphysical), has consequently been incorporated into the
BursteddeGravity gravity model that is described in the benchmarks/burstedde/burstedde.cc file that
accompanies this benchmark.
We will use the input file benchmarks/burstedde/burstedde.prm as input, which is very similar to the input
file benchmarks/inclusion/adaptive.prm discussed above in Section 5.4.6. The major changes for the 3D
polynomial Stokes benchmark are listed below:
The boundary conditions that are used are simply the velocities from equation
(55) prescribed on each boundary. The viscosity parameter in the input file is
. Furthermore, in order to
compute the velocity and pressure
and
norm, the postprocessor BursteddePostprocessor is used. Please note that the linear solver tolerance is set to
a very small value (deviating from the default value), in order to ensure that the solver can solve
the system accurately enough to make sure that the iteration error is smaller than the discretization
error.
Expected analytical solutions at two locations are summarised in Table 6 and can be deduced
from equations (55) and (56). Figure 77 shows that the analytical solution is indeed retrieved by the
model.
Table 6: Analytical solutions
| Quantity | | |
|
|
|
| | |
| | |
| | |
| |
The convergence of the numerical error of this benchmark has been analysed by playing
with the mesh refinement level in the input file, and results can be found in Figure 78. The
velocity shows cubic error convergence, while the pressure shows quadratic convergence in the
and
norms, as one would
hope for using elements
for the velocity and
elements for the pressure.
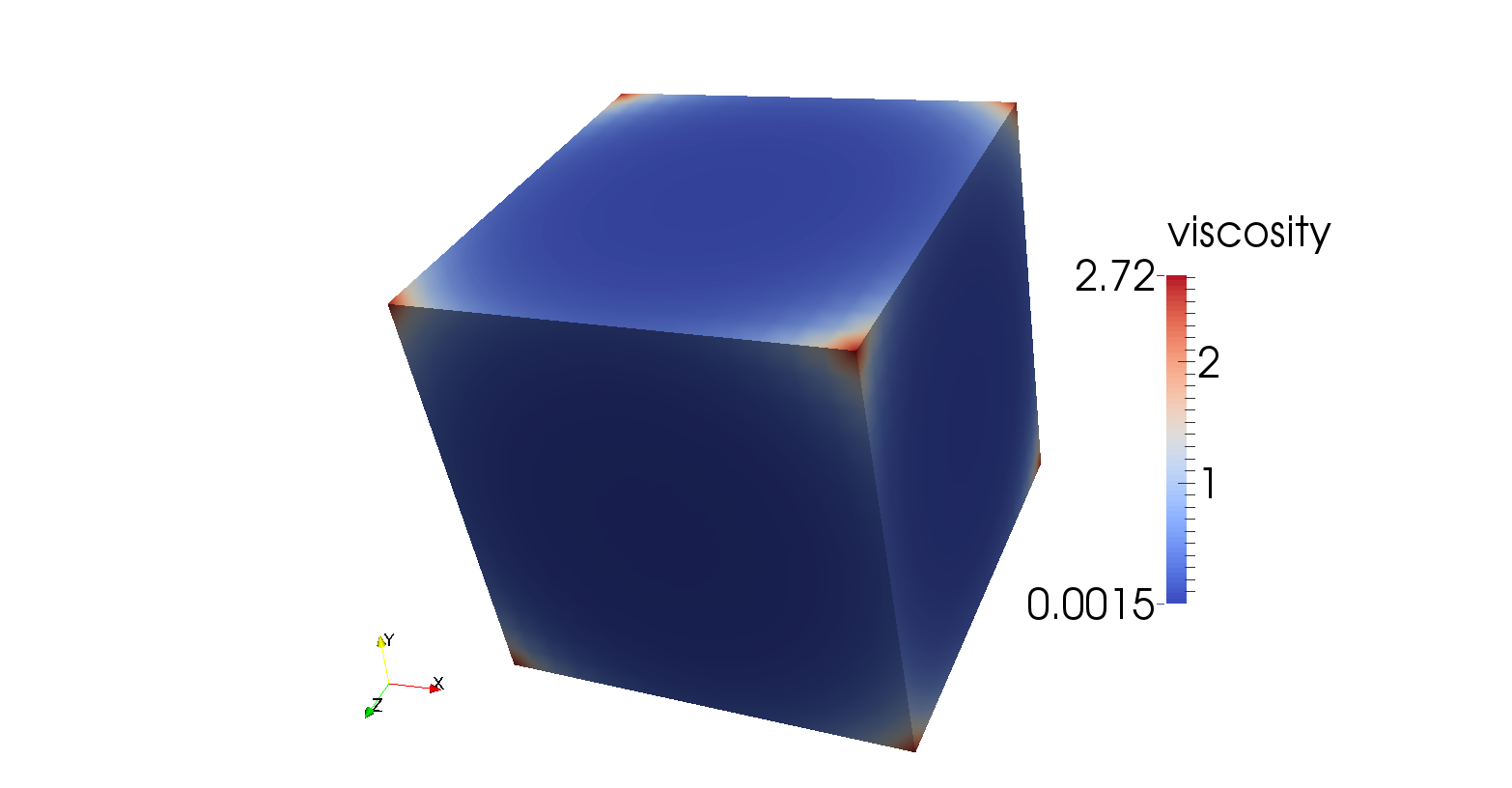
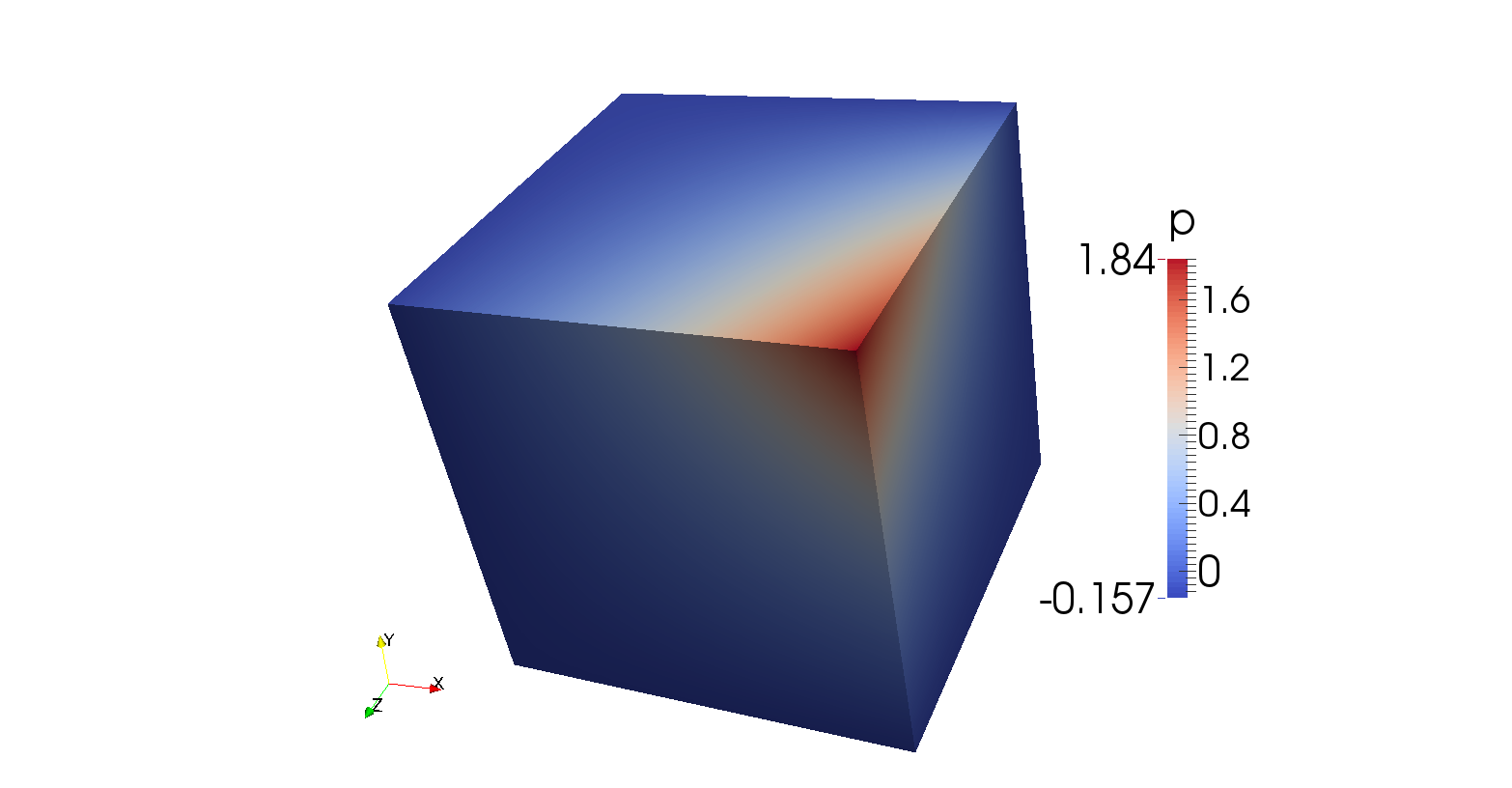
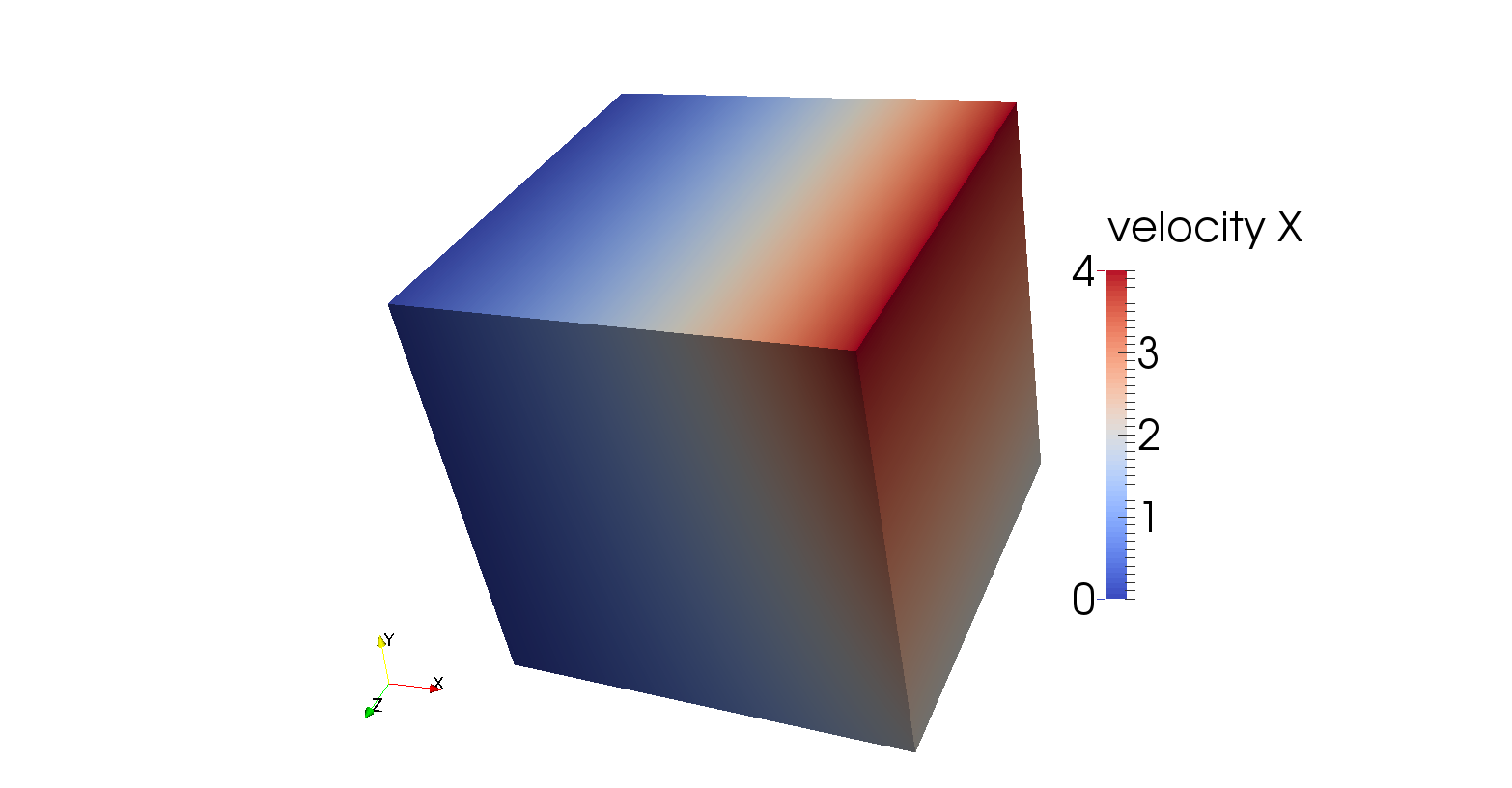
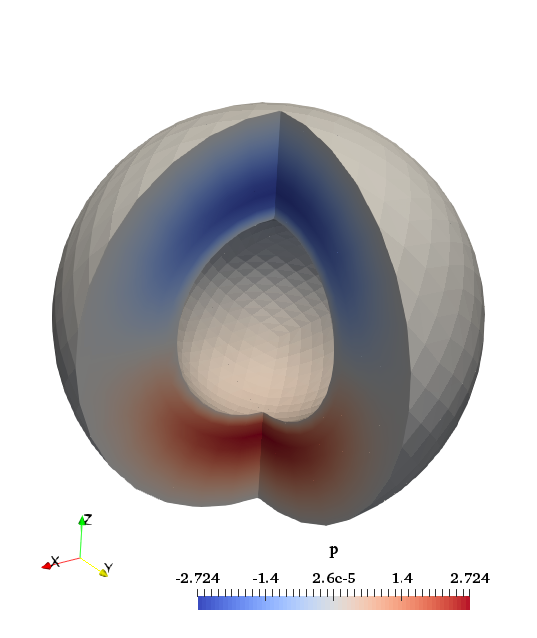
5.4.8 The hollow sphere benchmark
This benchmark is based on Thieulot [In prep.] in which an analytical solution to the isoviscous incompressible
Stokes equations is derived in a spherical shell geometry. The velocity and pressure fields are as follows:
where
with
These two parameters are chosen so that ,
i.e. the velocity is tangential to both inner and outer surfaces. The gravity vector is radial and of unit length, while
the density is given by:
|
| (70) |
We set ,
and
. The
pressure is zero on both surfaces so that the surface pressure normalization is used. The boundary conditions that
are used are simply the analytical velocity prescribed on both boundaries. The velocity and pressure fields are shown
in Fig. 79.
Fig. 80 shows the velocity and pressure errors in the
-norm as a function
of the mesh size
(taken in this case as the radial extent of the elements). As expected we recover a third-order convergence rate for
the velocity and a second-order convergence rate for the pressure.
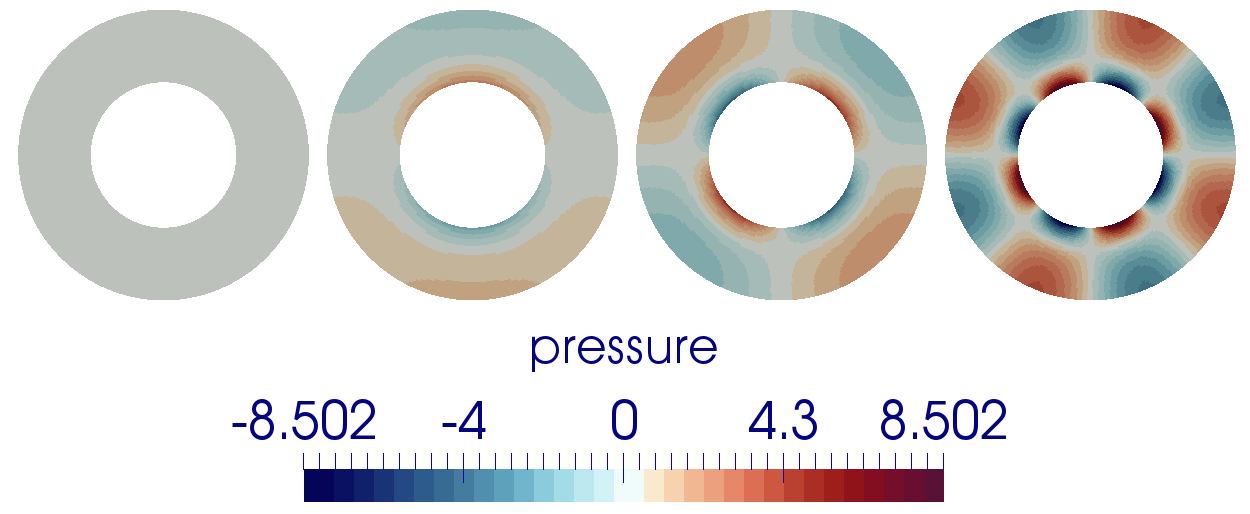
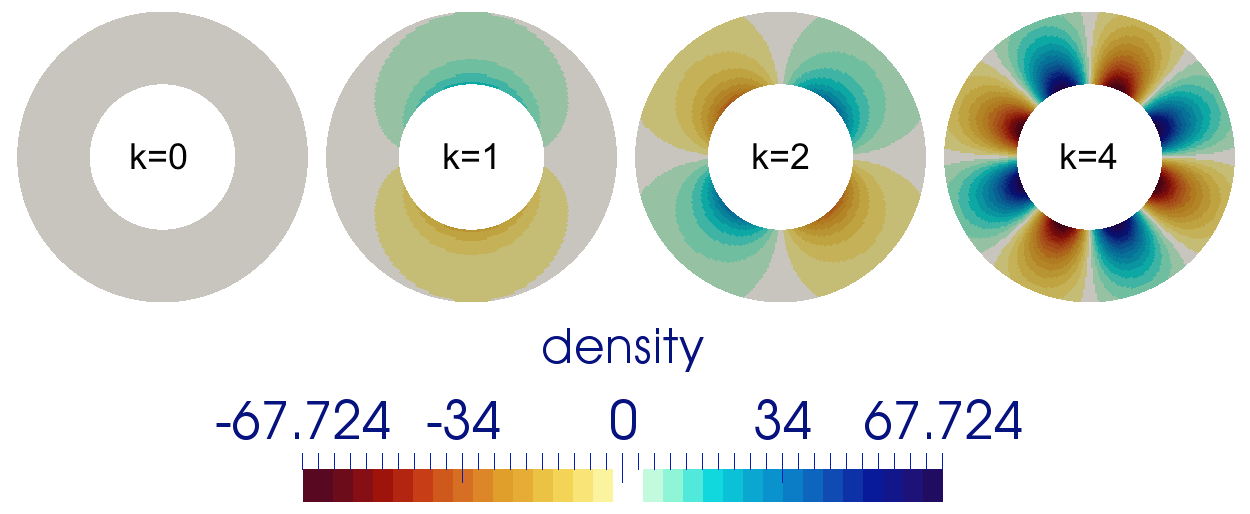
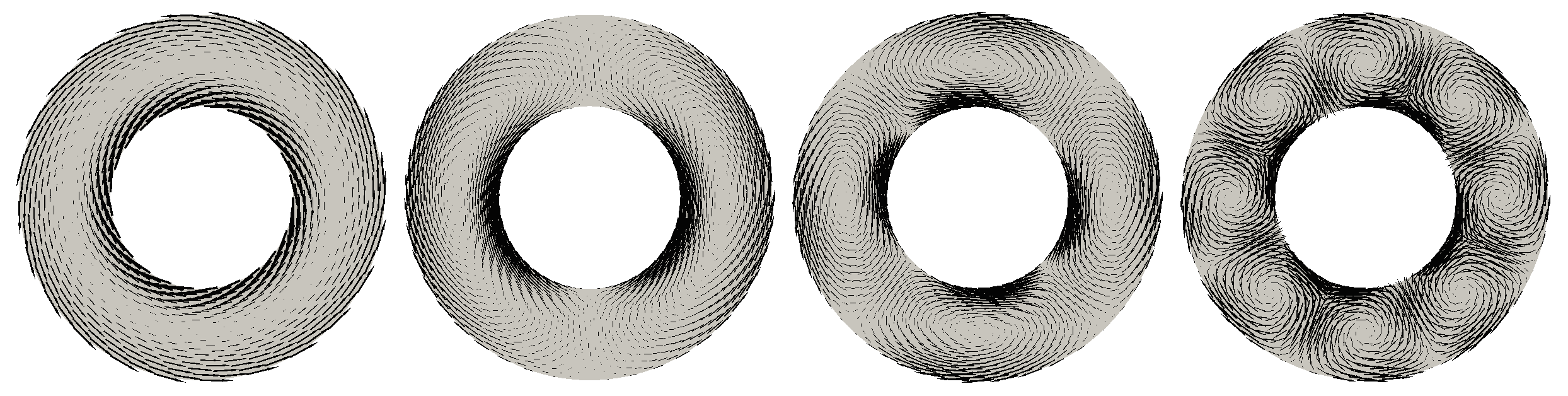
5.4.9 The 2D annulus benchmark
This benchmark is based on Thieulot & Puckett [In prep.] in which an analytical solution to the isoviscous
incompressible Stokes equations is derived in an annulus geometry. The velocity and pressure fields are as
follows:
with
The parameters
and are chosen
so that ,
i.e. the velocity is tangential to both inner and outer surfaces. The gravity vector is radial and of unit
length.
The parameter
controls the number of convection cells present in the domain, as shown in Fig. 81.
In the present case, we set ,
and
. Fig. 82 shows the velocity and
pressure errors in the -norm
as a function of the mesh size
(taken in this case as the radial extent of the elements). As expected we recover a third-order convergence rate for
the velocity and a second-order convergence rate for the pressure.
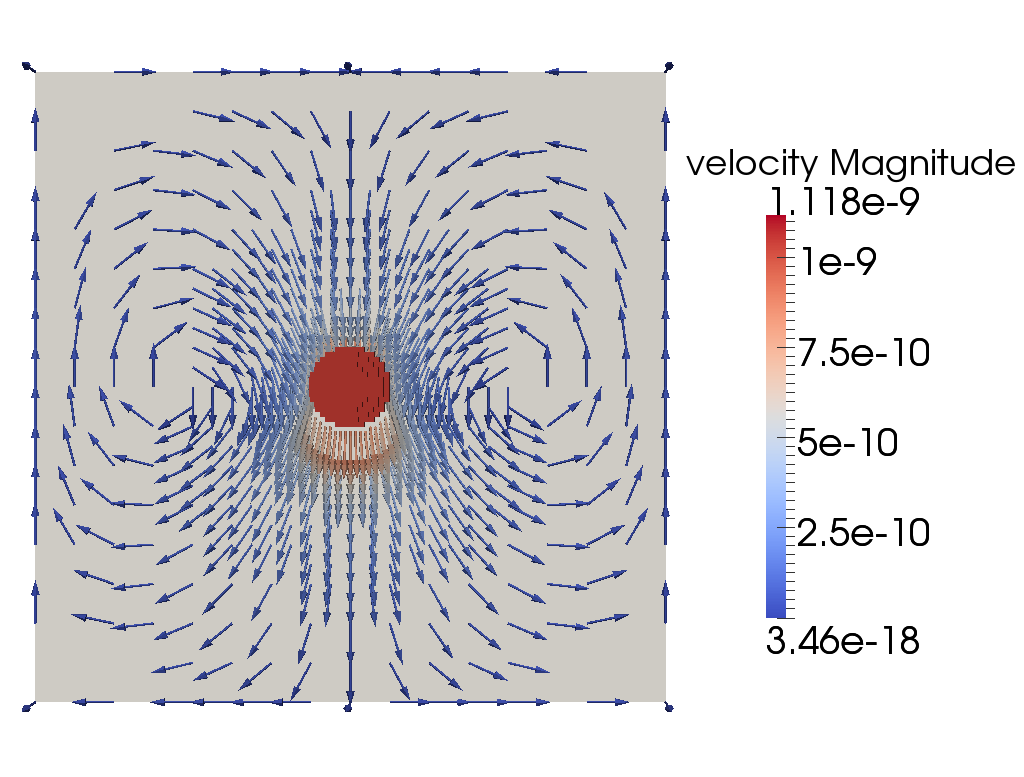
5.4.10 The “Stokes’ law” benchmark
This section was contributed by Juliane Dannberg.
Stokes’ law was derived by George Gabriel Stokes in 1851 and describes the frictional force a sphere with a density different
than the surrounding fluid experiences in a laminar flowing viscous medium. A setup for testing this law is a sphere with
the radius
falling in a highly viscous fluid with lower density. Due to its higher density the sphere is accelerated by the
gravitational force. While the frictional force increases with the velocity of the falling particle, the buoyancy force
remains constant. Thus, after some time the forces will be balanced and the settling velocity of the sphere
will
remain constant:
where is the dynamic viscosity of
the fluid, is the density difference
between sphere and fluid and
the gravitational acceleration. The resulting settling velocity is then given by
Because we do not take into account inertia in our numerical computation, the falling particle will reach the
constant settling velocity right after the first timestep.
For the setup of this benchmark, we chose the following parameters:
With these values, the exact value of sinking velocity is
.
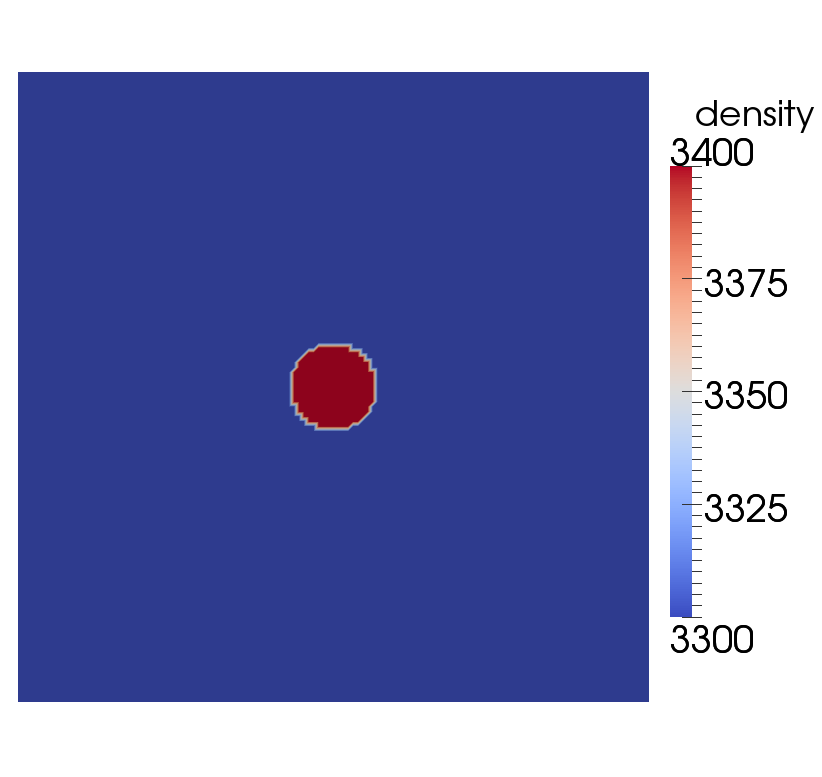
To run this benchmark, we need to set up an input file that describes the situation. In principle, what we need to
do is to describe a spherical object with a density that is larger than the surrounding material. There are multiple
ways of doing this. For example, we could simply set the initial temperature of the material in the sphere to a lower
value, yielding a higher density with any of the common material models. Or, we could use ASPECT’s
facilities to advect along what are called “compositional fields” and make the density dependent on these
fields.
We will go with the second approach and tell ASPECT to advect a single compositional field. The initial conditions
for this field will be zero outside the sphere and one inside. We then need to also tell the material model to increase the
density by
times the concentration of the compositional field. This can be done, like everything else, from the input
file.
All of this setup is then described by the following input file. (You can find the input file to run this cookbook
example in cookbooks/stokes.prm. For your first runs you will probably want to reduce the number of mesh
refinement steps to make things run more quickly.)
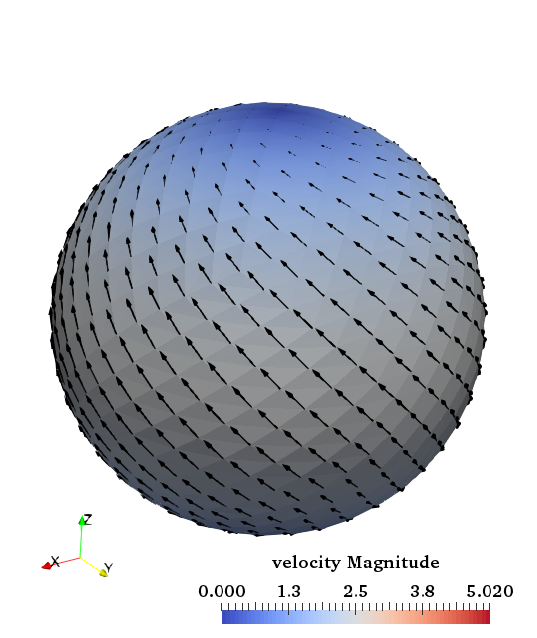
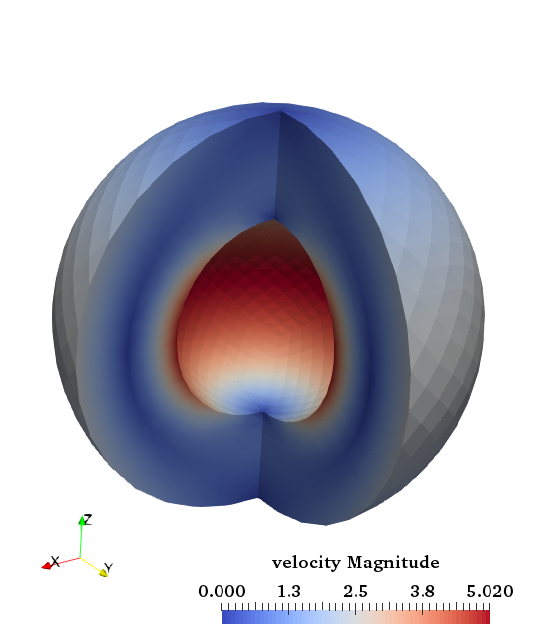
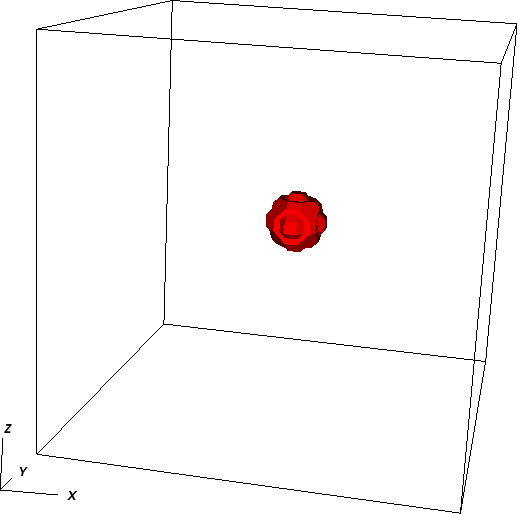
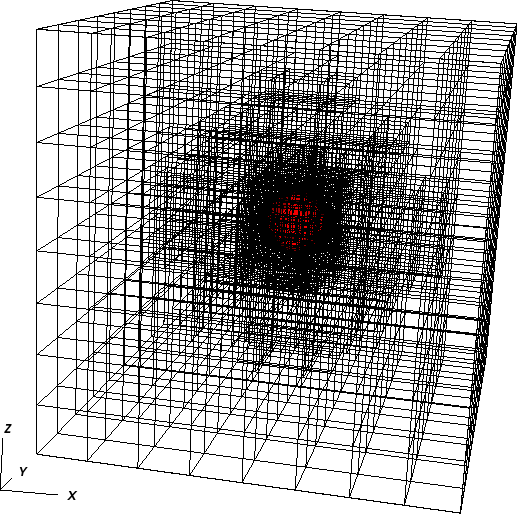
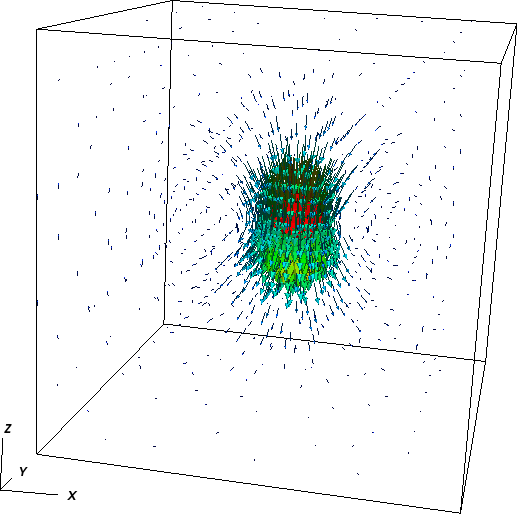
Using this input file, let us try to evaluate the results of the current computations for the settling velocity of the
sphere. You can visualize the output in different ways, one of it being ParaView and shown in Fig. 83 (an
alternative is to use Visit as described in Section 4.4; 3d images of this simulation using Visit are shown in Fig. 84).
Here, Paraview has the advantage that you can calculate the average velocity of the sphere using the following
filters:
- Threshold (Scalars: C_1, Lower Threshold 0.5, Upper Threshold 1),
- Integrate Variables,
- Cell Data to Point Data,
- Calculator (use the formula sqrt(velocity_x^2+ velocity_y^2+velocity_z^2)/Volume).
If you then look at the Calculator object in the Spreadsheet View, you can see the average
sinking velocity of the sphere in the column “Result” and compare it to the theoretical value
. In this case, the
numerical result is 8.865
when you add a few more refinement steps to actually resolve the 3d flow field adequately. The “velocity statistics”
postprocessor we have selected above also provides us with a maximal velocity that is on the same order of
magnitude. The difference between the analytical and the numerical values can be explained by different
at least the following three points: (i) In our case the sphere is viscous and not rigid as assumed in
Stokes’ initial model, leading to a velocity field that varies inside the sphere rather than being constant.
(ii) Stokes’ law is derived using an infinite domain but we have a finite box instead. (iii) The mesh
may not yet fine enough to provide a fully converges solution. Nevertheless, the fact that we get a
result that is accurate to less than 2% is a good indication that ASPECT implements the equations
correctly.
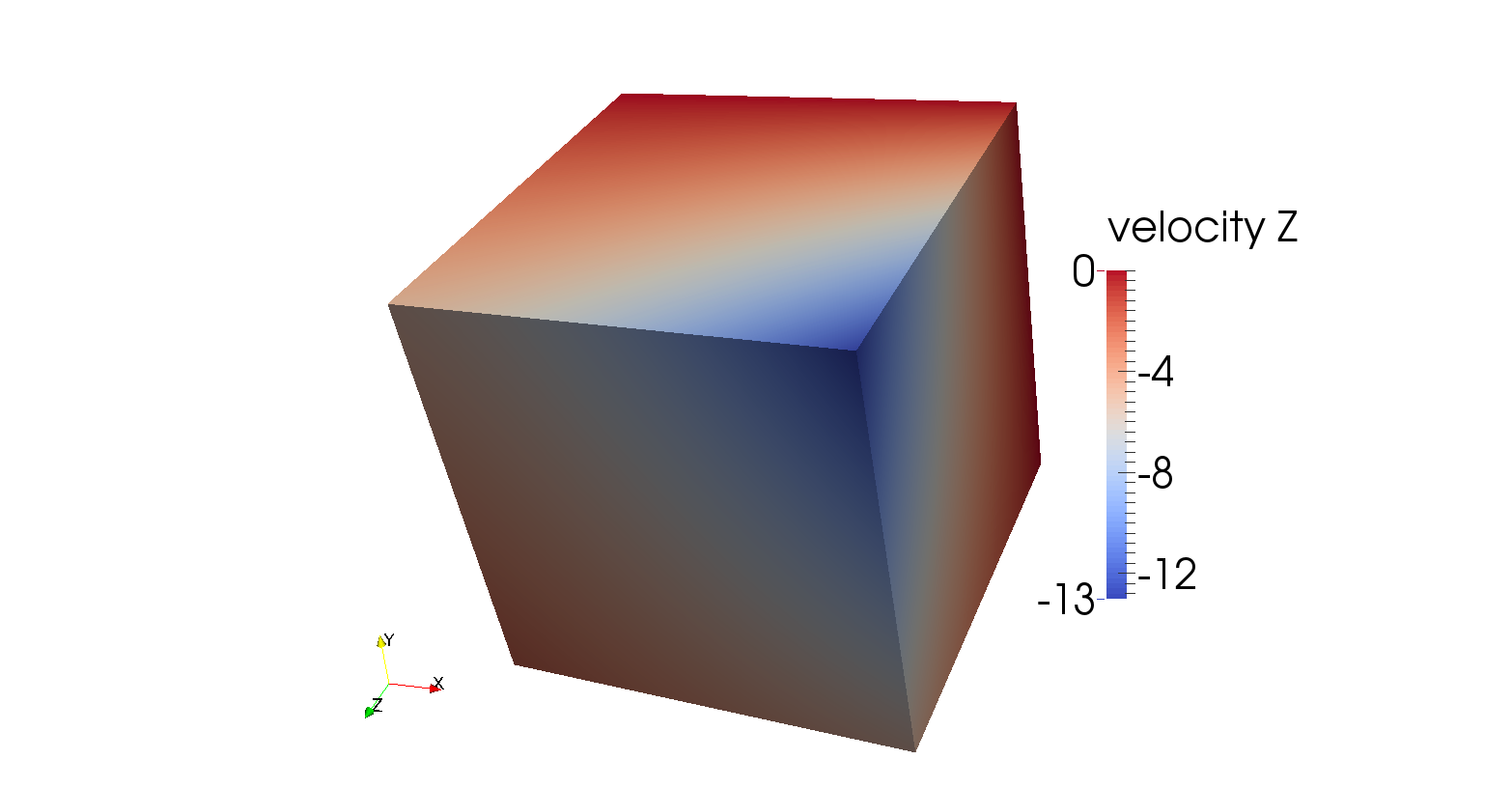
5.4.11 Latent heat benchmark
This section was contributed by Juliane Dannberg.
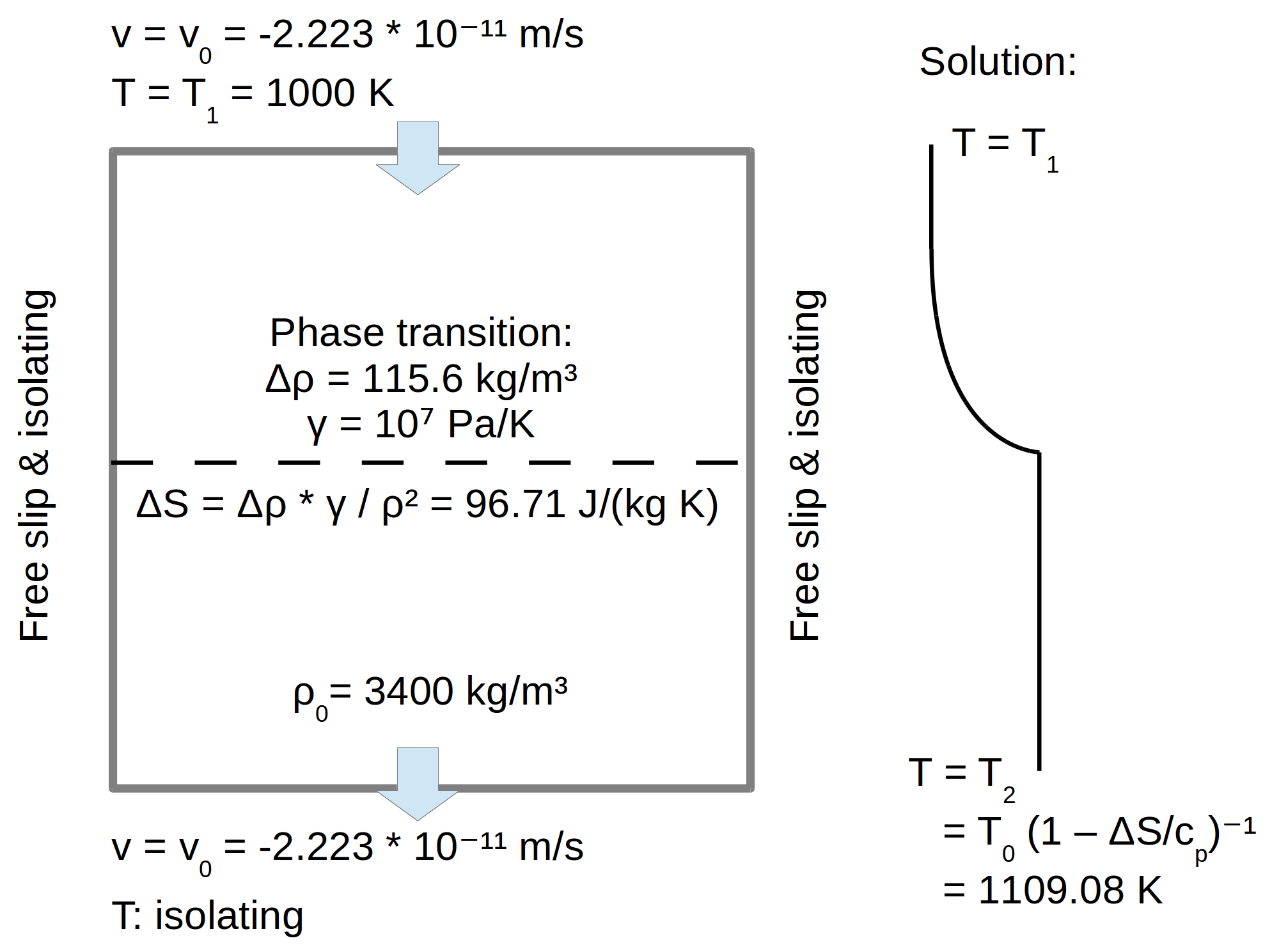
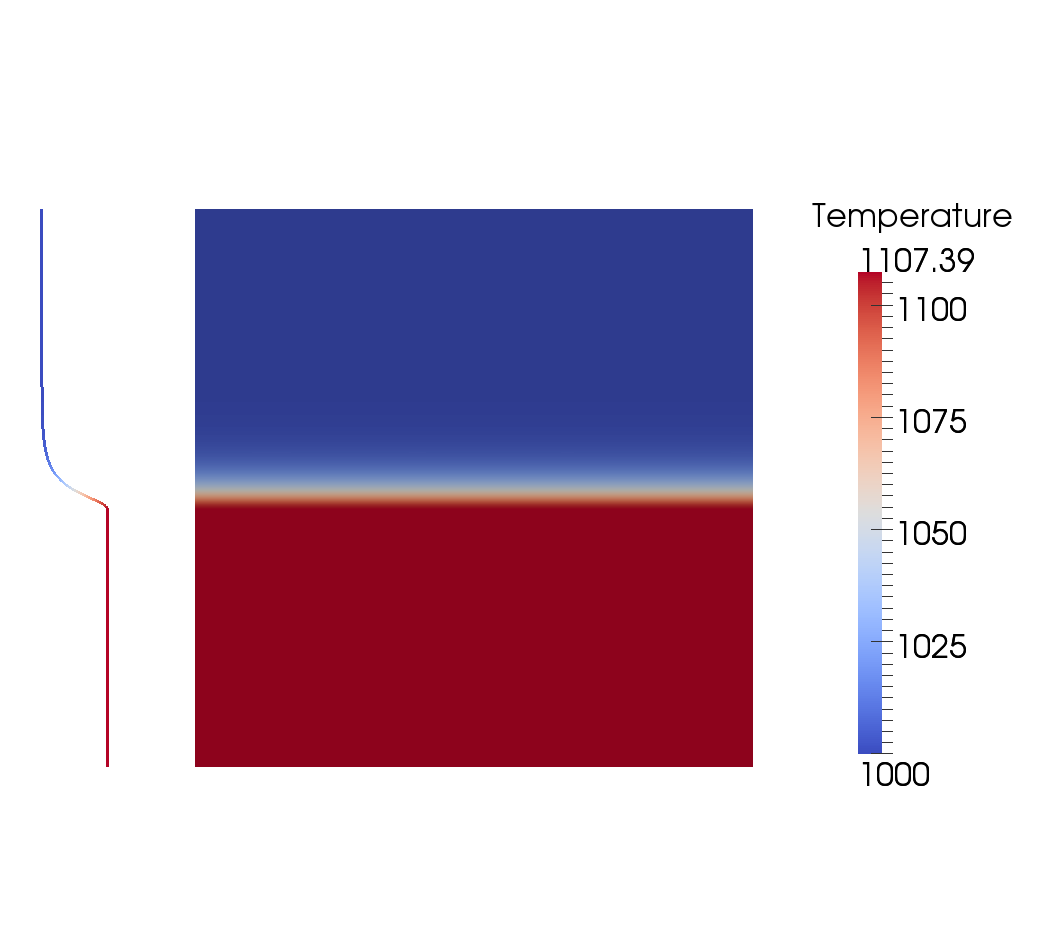
The setup of this benchmark is taken from Schubert, Turcotte and Olson [STO01] (part 1, p. 194) and is
illustrated in Fig. 85.
It tests whether the latent heat production when material crosses a phase transition is calculated correctly
according to the laws of thermodynamics. The material model defines two phases in the model domain with the
phase transition approximately in the center. The material flows in from the top due to a prescribed
downward velocity, and crosses the phase transition before it leaves the model domain at the bottom. As
initial condition, the model uses a uniform temperature field, however, upon the phase change, latent
heat is released. This leads to a characteristic temperature profile across the phase transition with
a higher temperature in the bottom half of the domain. To compute it, we have to solve equation
(3) or its reformulation (5). For steady-state one-dimensional downward flow with vertical velocity
, it
simplifies to the following:
Here, with
the thermal
conductivity and
the thermal diffusivity. The first term on the right-hand side of the equation describes the latent heat
produced at the phase transition: It is proportional to the temperature T, the entropy change
across
the phase transition divided by the specific heat capacity and the derivative of the phase function X. If the velocity
is smaller than a critical value, and under the assumption of a discontinuous phase transition (i.e. with a step
function as phase function), this latent heating term will be zero everywhere except for the one point
where the phase transition takes place. This means, we have a region above the phase transition
with only phase 1, and below a certain depth a jump to a region with only phase 2. Inside
of these one-phase regions, we can solve the equation above (using the boundary conditions
for
and
for
) and
get
While it is not entirely obvious while this equation for
should be
correct (in particular why it should be asymmetric), it is not difficult to verify that it indeed satisfies the equation stated
above for both
and .
Furthermore, it indeed satisfies the jump condition we get by evaluating the equation at
. Indeed,
the jump condition can be reinterpreted as a balance of heat conduction: We know the amount of heat that is
produced at the phase boundary, and as we consider only steady-state, the same amount of heat is conducted
upwards from the transition:
In contrast to [STO01], we also consider the density change
across
the phase transition: While the heat conduction takes place above the transition and the density can be assumed as
const., the latent heat is released directly at the phase transition. Thus, we assume an average density
for the
left side of the equation. Rearranging this equation gives
In addition, we have tested the approach exactly as it is described in [STO01] by setting the entropy change to a
specific value and in spite of that using a constant density. However, this is physically inconsistent, as the entropy
change is proportional to the density change across the phase transition. With this method, we could reproduce the
analytic results from [STO01].
The exact values of the parameters used for this benchmark can be found in Fig. 85. They result in a predicted
value of
for the temperature in the bottom half of the model, and we will demonstrate below that we can match this value in
our numerical computations. However, it is not as simple as suggested above. In actual numerical computations, we
can not exactly reproduce the behavior of Dirac delta functions as would result from taking the derivative
of a discontinuous
function . Rather,
we have to model
as a function that has a smooth transition from one value to another, over a depth region of a certain width. In the
material model plugin we will use below, this depth is an input parameter and we will play with it in the numerical
results shown after the input file.
To run this benchmark, we need to set up an input file that describes the situation. In principle, what we need to
do is to describe the position and entropy change of the phase transition in addition to the previously outlined boundary
and initial conditions. For this purpose, we use the “latent heat” material model that allows us to set the density change
and Clapeyron slope
(which together determine
the entropy change via )
as well as the depth of the phase transition as input parameters.
All of this setup is then described by the input file cookbooks/latent-_heat.prm that models flow in a box of
meters
of height and width, and a fixed downward velocity. The following section shows the central part of this
file:
The complete input file referenced above also sets the number of mesh refinement steps. For your first runs you
will probably want to reduce the number of mesh refinement steps to make things run more quickly.
Later on, you might also want to change the phase transition width to look how this influences the
result.
Using this input file, let us try to evaluate the results of the current computations. We note that it takes some
time for the model to reach a steady state and only then does the bottom temperature reach the theoretical value.
Therefore, we use the last output step to compare predicted and computed values. You can visualize the output in
different ways, one of it being ParaView and shown in Fig. 85 on the right side (an alternative is to use Visit as
described in Section 4.4). In ParaView, you can plot the temperature profile using the filter “Plot Over
Line” (Point1: 500000,0,0; Point2: 500000,1000000,0, then go to the “Display” tab and select “T” as
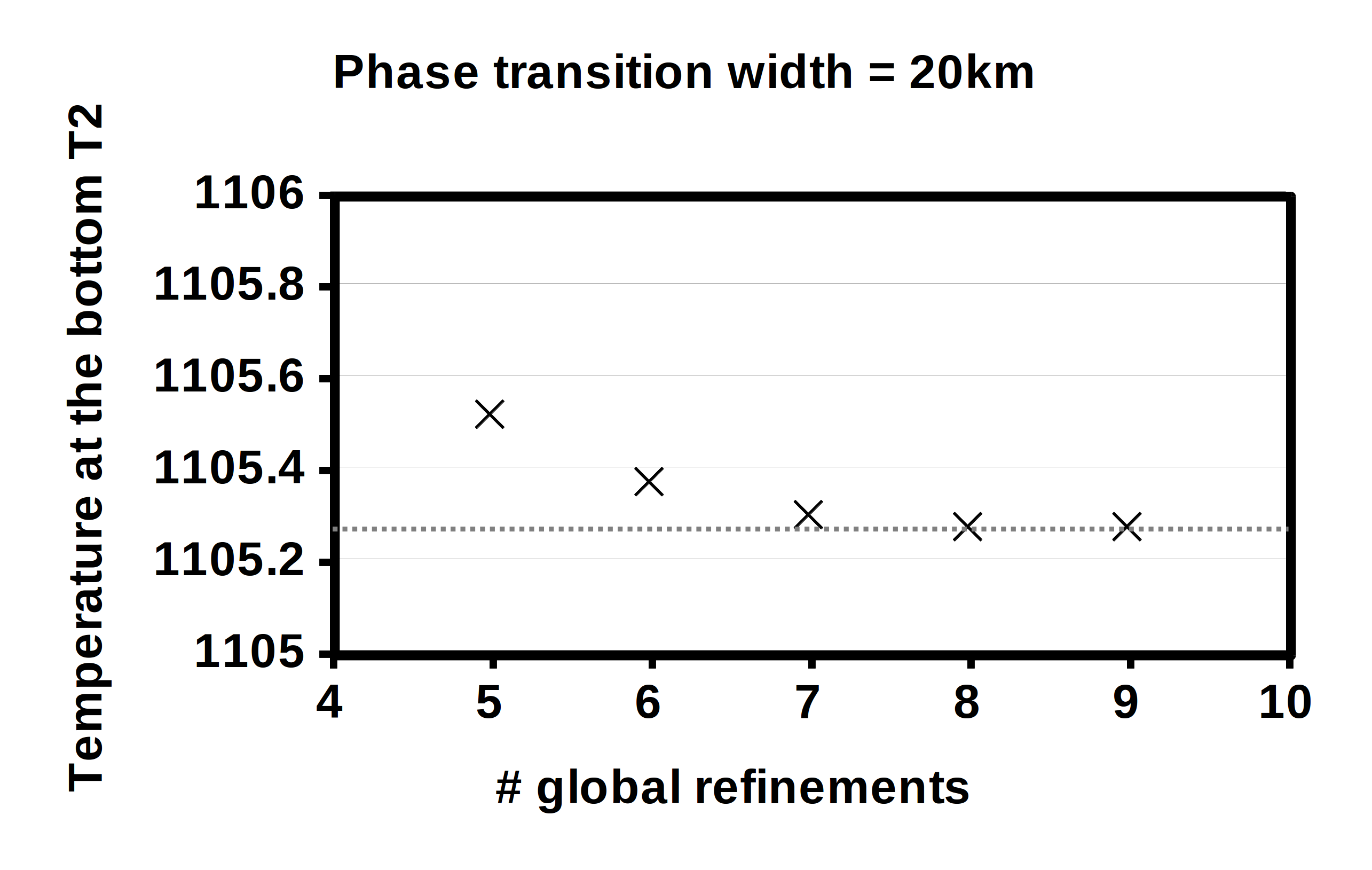
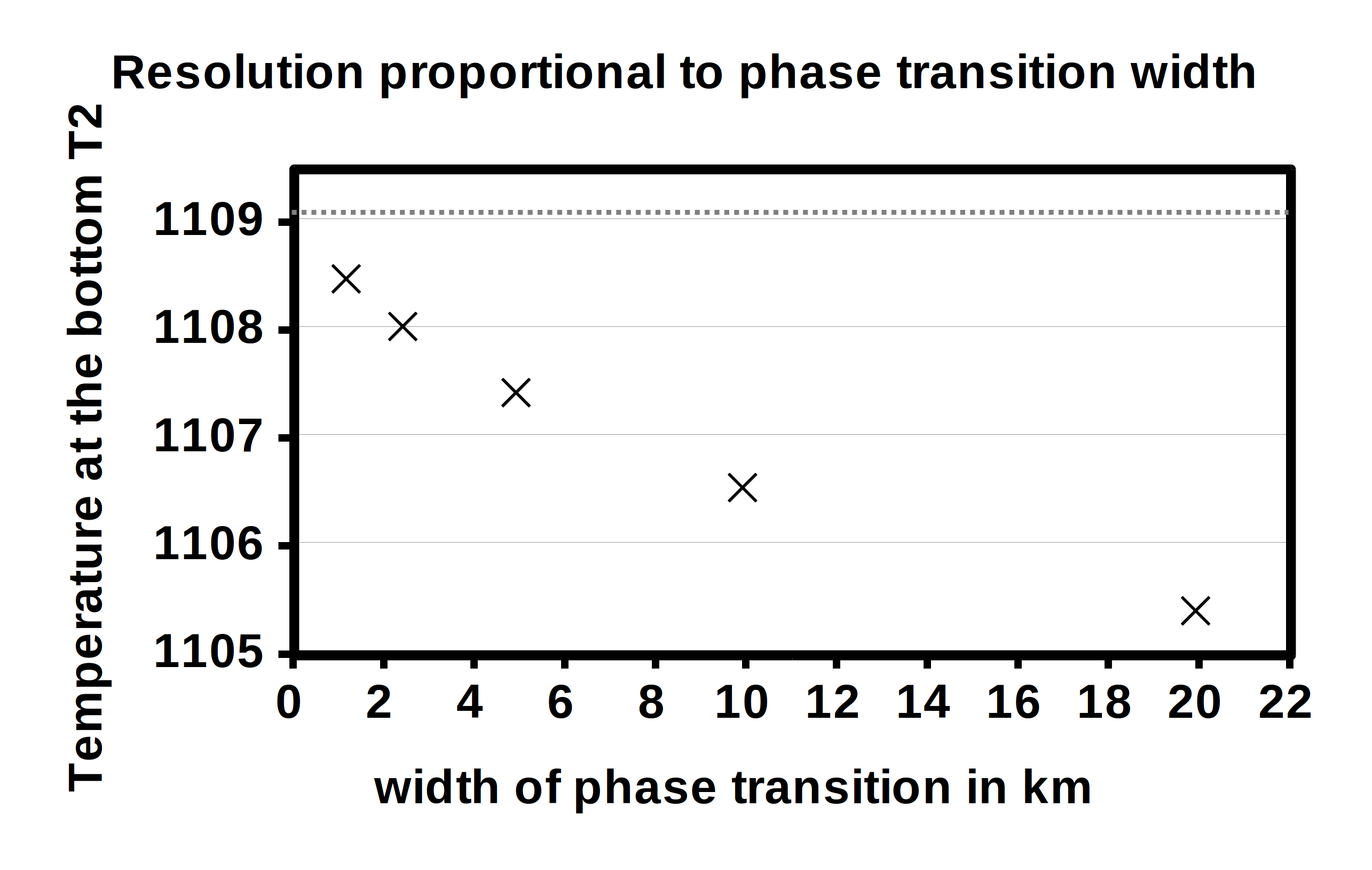
only variable in the “Line series” section) or “Calculator” (as seen in Fig. 85). In Fig. 86 (left) we
can see that with increasing resolution, the value for the bottom temperature converges to a value of
.
However, this is not what the analytic solution predicted. The reason for this difference is the width of the phase
transition with which we smooth out the Dirac delta function that results from differentiating the
we
would have liked to use in an ideal world. (In reality, however, for the Earth’s mantle we also expect
phase transitions that are distributed over a certain depth range and so the smoothed out approach
may not be a bad approximation.) Of course, the results shown above result from an the analytical
approach that is only correct if the phase transition is discontinuous and constrained to one specific depth
.
Instead, we chose a hyperbolic tangent as our phase function. Moreover, Fig. 86 (right) illustrates
what happens to the temperature at the bottom when we vary the width of the phase
transition: The smaller the width, the closer the temperature gets to the predicted value of
,
demonstrating that we converge to the correct solution.
5.4.12 The 2D cylindrical shell benchmarks by Davies et al.
This section was contributed by William Durkin and Wolfgang Bangerth.
All of the benchmarks presented so far take place in a Cartesian domain. Davies et al. describe a benchmark (in
a paper that is currently still being written) for a 2D spherical Earth that is nondimensionalized such
that
| = 1.22 | = 1 |
| = 2.22 | = 0 |
The benchmark is run for a series of approximations (Boussinesq, Extended Boussinesq, Truncated Anelastic Liquid,
and Anelastic Liquid), and temperature, velocity, and heat flux calculations are compared with the results of other
mantle modeling programs. ASPECT will output all of these values directly except for the Nusselt number, which we
must calculate ourselves from the heat fluxes that ASPECT can compute. The Nusselt number of the top and bottom
surfaces,
and ,
respectively, are defined by the authors of the benchmarks as
|
| (83) |
and
|
|
where is
the ratio .
We can put this in terms of heat flux
through the inner and outer surfaces, where
is heat flux in the radial direction. Let
be the total heat that flows through a surface,
then (83) becomes
|
|
and similarly
|
|
and
are heat
fluxes that ASPECT can readily compute through the heat flux statistics postprocessor (see Section ??). For
further details on the nondimensionalization and equations used for each approximation, refer to Davies et
al.
The series of benchmarks is then defined by a number of cases relating to the exact equations chosen to model
the fluid. We will discuss these in the following.
Case 1.1: BA_Ra104_Iso_ZS.
This case is run with the following settings:
- Boussinesq Approximation
- Boundary Condition: Zero-Slip
- Rayleigh Number =
- Initial Conditions:
where and
refer to
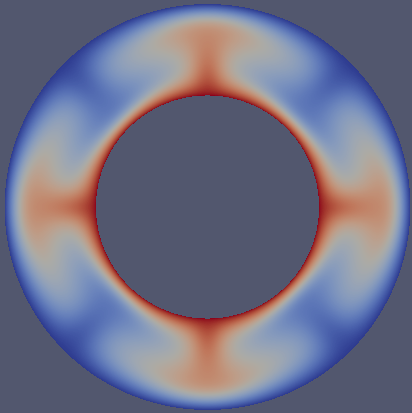
the degree and order of a spherical harmonic that describes the initial temperature. While the initial conditions
matter, what is important here though is that the system evolve to four convective cells since we are only interested
in the long term, steady state behavior.
The model is relatively straightforward to set up, basing the input file on that discussed in Section 5.3.1. The
full input file can be found at benchmarks/davies_et_al/case-_1.1.prm, with the interesting parts excerpted as
follows:
We use the same trick here as in Section 5.2.1 to produce a model in which the density
in the
temperature equation (3) is almost constant (namely, by choosing a very small thermal expansion coefficient) as
required by the benchmark, and instead prescribe the desired Rayleigh number by choosing a correspondingly large
gravity.
Results for this and the other cases are shown below.
Case 2.1: BA_Ra104_Iso_FS.
Case 2.1 uses the following setup, differing only in the boundary conditions:
- Boussinesq Approximation
- Boundary Condition: Free-Slip
- Rayleigh Number =
- Initial Conditions:
As a consequence of the free slip boundary conditions, any solid body rotation of the entire system satisfies the
Stokes equations with their boundary conditions. In other words, the solution of the problem is not unique: given a
solution, adding a solid body rotation yields another solution. We select arbitrarily the one that has no net rotation
(see Section ??). The section in the input file that is relevant is then as follows (the full input file resides at
benchmarks/davies_et_al/case-_2.1.prm):
Again, results are shown below.
Case 2.2: BA_Ra105_Iso_FS.
Case 2.2 is described as follows:
- Boussinesq Approximation
- Boundary Condition: Free-Slip
- Rayleigh Number =
- Initial Conditions: Final conditions of case 2.1 (BA_Ra104_Iso_FS)
In other words, we have an increased Rayleigh number and begin with the final steady state of case 2.1. To start the
model where case 2.1 left off, the input file of case 2.1, benchmarks/davies_et_al/case-_2.1.prm, instructs
ASPECT to checkpoint itself every few time steps (see Section 4.5). If case 2.2 uses the same output directory, we
can then resume the computations from this checkpoint with an input file that prescribes a different Rayleigh
number and a later input time:
We increase the Rayleigh number to
by increasing the magnitude of gravity in the input file. The full script for case 2.2 is located in
benchmarks/davies_et_al/case-_2.2.prm
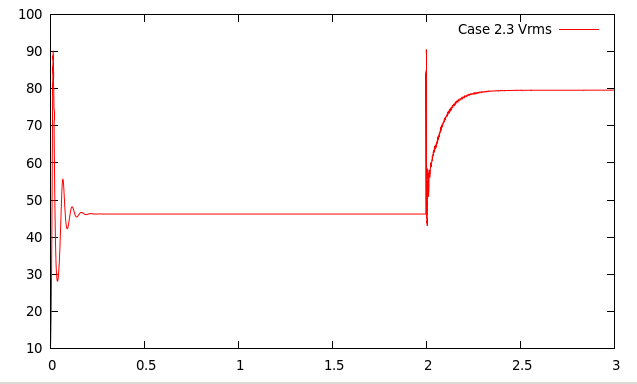
Case 2.3: BA_Ra103_vv_FS.
Case 2.3 is a variation on the previous one:
- Boussinesq Approximation
- Boundary Condition: Free-Slip
- Rayleigh Number =
- Initial Conditions: Final conditions of case 2.1 (BA_Ra104_Iso_FS)
The Rayleigh number is smaller here (and is selected using the gravity parameter in the input file, as before), but the
more important change is that the viscosity is now a function of temperature. At the time of writing, there is no
material model that would implement such a viscosity, so we create a plugin that does so for us (see Sections 6
and 6.2 in general, and Section 6.3.1 for material models in particular). The code for it is located in
benchmarks/davies_et_al/case-_2.3-_plugin/VoT.cc (where “VoT” is short for “viscosity as a
function of temperature”) and is essentially a copy of the simpler material model. The primary change
compared to the simpler material model is the line about the viscosity in the following function:
template <int dim> void VoT<dim>:: evaluate(const typename Interface<dim>::MaterialModelInputs &in, typename Interface<dim>::MaterialModelOutputs &out) const { for (unsigned int i=0; i<in.position.size(); ++i) { out.viscosities[i] = eta*std::pow(1000,(-in.temperature[i])); out.densities[i] = reference_rho * (1.0 - thermal_alpha * (in.temperature[i] - reference_T)); out.thermal_expansion_coefficients[i] = thermal_alpha; out.specific_heat[i] = reference_specific_heat; out.thermal_conductivities[i] = k_value; out.compressibilities[i] = 0.0; } }
Using the method described in Sections 5.4.1 and 6.2, and the files in the benchmarks/davies_et_al/case-2.3-plugin,
we can compile our new material model into a shared library that we can then reference from the input file. The
complete input file for case 2.3 is located in benchmarks/davies_et_al/case-_2.3.prm and contains among others
the following parts:
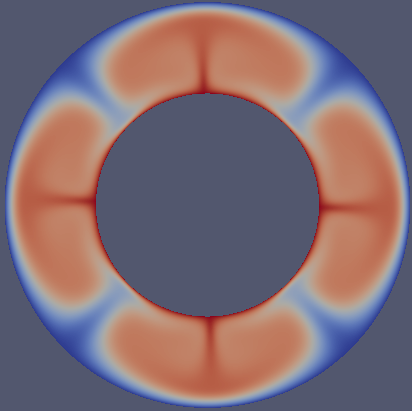
Results.
In the following, let us discuss some of the results of the benchmark setups discussed above. First, the final
steady state temperature fields are shown in Fig. 87. It is immediately obvious how the different Rayleigh numbers
affect the width of the plumes. If one imagines a setup with constant gravity, constant inner and outer temperatures
and constant thermal expansion coefficient (this is not how we describe it in the input files, but we could have
done so and it is closer to how we intuit about fluids than adjusting the gravity), then the Rayleigh
number is inversely proportional to the viscosity – and it is immediately clear that larger Rayleigh
numbers (corresponding to lower viscosities) then lead to thinner plumes. This is nicely reflected in the
visualizations.
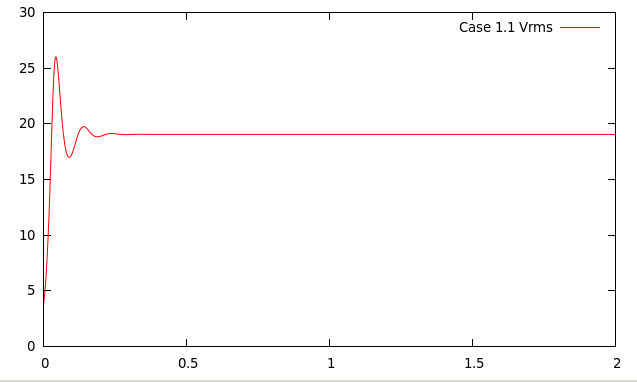
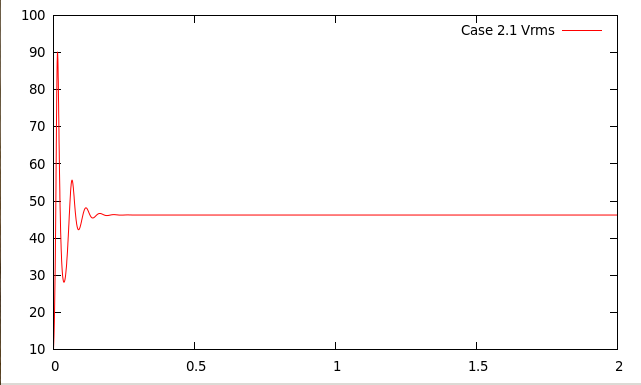
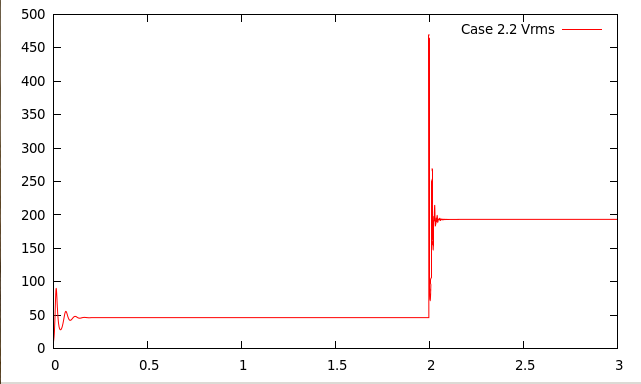
Secondly, Fig. 88 shows the root mean square velocity as a function of time for the various cases. It is obvious
that they all converge to steady state solutions. However, there is an initial transient stage and, in cases 2.2 and 2.3,
a sudden jolt to the system at the time where we switch from the model used to compute up to time
to the
different models used after that.
These runs also produce quantitative data that will be published along with the concise descriptions of the benchmarks
and a comparison with other codes. In particular, some of the criteria listed above to judge the accuracy of results are listed
in Table 7.
|
|
|
|
|
| Case | | | | |
|
|
|
|
|
| 1.1 | 0.403 | 2.464 | 2.468 | 19.053 |
| 2.1 | 0.382 | 4.7000 | 4.706 | 46.244 |
| 2.2 | 0.382 | 9.548 | 9.584 | 193.371 |
| 2.3 | 0.582 | 5.102 | 5.121 | 79.632 |
|
|
|
|
|
| |
Table 7: Davies et al. benchmarks: Numerical results for some of the output quantities required by the
benchmarks and the various cases considered.
5.4.13 The Crameri et al. benchmarks
This section was contributed by Ian Rose.
This section follows the two free surface benchmarks described by Crameri et al.
[CSG12].
Case 1: Relaxation of topography.
The first benchmark involves a high viscosity lid sitting on top of a lower viscosity mantle. There is an
initial sinusoidal topography which is then allowed to relax. This benchmark has a semi-analytical
solution (which is exact for infinitesimally small topography). Details for the benchmark setup are in
Figure 89.
The complete parameter file for this benchmark can be found in benchmarks/crameri_et_al/case_1/crameri_benchmark_1.prm,
the most relevant parts of which are excerpted here:
In particular, this benchmark uses a custom geometry model to set the initial geometry. This geometry model, called
“ReboundBox”, is based on the Box geometry model. It generates a domain in using the same parameters as Box, but
then displaces all the nodes vertically with a sinusoidal perturbation, where the magnitude and order of that
perturbation are specified in the ReboundBox subsection.
The characteristic timescales of topography relaxation are significantly smaller than those of mantle convection.
Taking timesteps larger than this relaxation timescale tends to cause sloshing instabilities, which are described
further in Section 2.12. Some sort of stabilization is required to take large timesteps. In this benchmark, however,
we are interested in the relaxation timescale, so we are free to take very small timesteps (in this case, 0.01 times the
CFL number). As can be seen in Figure 90, the results of all the codes which are included in this comparison are
basically indistinguishable.
Case 2: Dynamic topography.
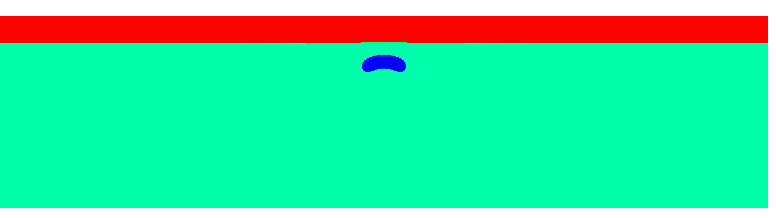
Case two is more complicated. Unlike the case one, it occurs over mantle convection timescales. In this
benchmark there is the same high viscosity lid over a lower viscosity mantle. However, now there is a blob of
buoyant material rising in the center of the domain, causing dynamic topography at the surface. The details for the
setup are in the caption of Figure 91.
Case two requires higher resolution and longer time integrations than case one. The benchmark is over 20 million years and builds
dynamic topography of
meters.
Again, we excerpt the most relevant parts of the parameter file for this benchmark, with the full thing available
in benchmarks/crameri_et_al/case_2/crameri_benchmark_2.prm. Here we use the “Multicomponent” material
model, which allows us to easily set up a number of compositional fields with different material properties. The first
compositional field corresponds to background mantle, the second corresponds to the rising blob, and the third
corresponds to the viscous lid.
Furthermore, the results of this benchmark are sensitive to the mesh refinement and timestepping
parameters. Here we have nine refinement levels, and refine according to density and the compositional
fields.
Unlike the first benchmark, for case two there is no (semi) analytical solution to compare against. Furthermore,
the time integration for this benchmark is much longer, allowing for errors to accumulate. As such, there is
considerably more scatter between the participating codes. ASPECT does, however, fall within the range of the
other results, and the curve is somewhat less wiggly. The results for maximum topography versus time are shown
in 92
The precise values for topography at a given time are quite dependent on the resolution and timestepping parameters.
Following [CSG12]
we investigate the convergence of the maximum topography at 3 Ma as a function of CFL number and mesh
resolution. The results are shown in figure 93.
We find that at 3 Ma ASPECT converges to a maximum topography of
396
meters. This is slightly different from what MILAMIN_VEP reported as its convergent value in
[CSG12],
but still well within the range of variation of the codes. Additionally, we note that ASPECT is able to achieve good
results with relatively less mesh resolution due to the ability to adaptively refine in the regions of interest (namely,
the blob and the high viscosity lid).
Accuracy improves roughly linearly with decreasing CFL number, though stops improving at CFL
.
Accuracy also improves with increasing mesh resolution, though its convergence order does not seem to be
excellent. It is possible that other mesh refinement parameters than we tried in this benchmark could
improve the convergence. The primary challenge in accuracy is limiting numerical diffusion of the
rising blob. If the blob becomes too diffuse, its ability to lift topography is diminished. It would be
instructive to compare the results of this benchmark using particles with the results using compositional
fields.
5.4.14 The solitary wave benchmark
This section was contributed by Juliane Dannberg and is based on a section in [DH16] by Juliane Dannberg and
Timo Heister.
One of the most widely used benchmarks for codes that model the migration of melt through a compacting and
dilating matrix is the propagation of solitary waves (e.g. [SS11, KMK13, Sch00]). The benchmark is intended to
test the accuracy of the solution of the two-phase flow equations as described in Section 2.13 and makes use of the
fact that there is an analytical solution for the shape of solitary waves that travel through a partially molten rock
with a constant background porosity without changing their shape and with a constant wave speed. Here, we follow
the setup of the benchmark as it is described in [BR86], which considers one-dimensional solitary
waves.
The model features a perturbation of higher porosity with the amplitude
in a uniform
low-porosity ()
background. Due to its lower density, melt migrates upwards, dilating the solid matrix at its front and compacting it
at its end.
Assuming constant shear and compaction viscosities and using a permeability law of the form
the analytical solution for the shape of the solitary wave can be written in implicit form as:
and the phase speed , scaled back
to physical units, is . This is only
valid in the limit of small porosity .
Figure 94 illustrates the model setup.
The parameter file and material model for this setup can be found in benchmarks/solitary_wave/solitary_wave.prm
and benchmarks/solitary_wave/solitary_wave.cc. The most relevant sections are shown in the following
paragraph.
The benchmark uses a custom model to generate the initial condition for the porosity field as specified by the
analytical solution, and its own material model, which includes the additional material properties needed by models
with melt migration, such as the permeability, melt density and compaction viscosity. The solitary wave
postprocessor compares the porosity and pressure in the model to the analytical solution, and computes the errors
for the shape of the porosity, shape of the compaction pressure and the phase speed. We apply the negative phase
speed of the solitary wave as a boundary condition for the solid velocity. This changes the reference frame, so that
the solitary wave stays in the center of the domain, while the solid moves downwards. The temperature evolution
does not play a role in this benchmark, so all temperature and heating-related parameters are disabled or set to
zero.
And extensive discussion of the results and convergence behavior can be found in [DH16].
5.4.15 Benchmarks for operator splitting
This section was contributed by Juliane Dannberg.
Models of mantle convection and lithosphere dynamics often also contain reactions between materials with
different chemical compositions, or processes that can be described as reactions. The most common example is
mantle melting: When mantle temperatures exceed the solidus, rocks start to melt. As this is only partial melting,
and rocks are a mixture of different minerals, which all contain different chemical components, melting is not only a
phase transition, but also leads to reactions between solid and molten rock. Some components are more compatible
with the mineral structure, and preferentially stay in the solid rock, other components will mainly move into the
mantle melt. This means that the composition of both solid and melt change over time depending on the melt
fraction.
Usually, it is assumed that these reactions are much faster than convection in the mantle. In other words, these
reactions are so fast that melt is assumed to be always in equilibrium with the surrounding solid rock. In some cases,
the formation of new oceanic crust, which is also caused by partial melting, is approximated by a conversion from an
average, peridotitic mantle composition to mid-ocean ridge basalt, forming the crust, and harzburgitic lithosphere,
once material reaches a given depth. This process can also be considered as a reaction between different
compositional fields.
This can cause accuracy problems in geodynamic simulations: The way the equations
are formulated (see Equations 1–4), ideally we would need to know reaction rates (the
)
between the different components instead of the equilibrium value (which would then have to be compared with
some sort of “old solution” of the compositional fields). Sometimes we also may not know the equilibrium,
and would only be able to find it iteratively, starting from the current composition. In addition, the
reaction rate for a given compositional field usually depends on the value of the field itself, but can also
depend on other compositional fields or the temperature and pressure, and the dependence can be
nonlinear.
Hence, ASPECT has the option to decouple the advection from reactions between compositional fields, using
operator splitting.
Instead of solving the coupled equation
and directly obtaining the composition value
for the time step from
the value from the
previous time step ,
we do a first-order operator split, first solving the advection problem
using the advection time step .
Then we solve the reactions as a series of coupled ordinary differential equations
This can be done in several iterations, choosing a different, smaller time step size
for the
time discretization. The updated value of the compositional field after the overall (advection + reaction) time step is
then obtained as
This is very useful if the time scales of reactions are different from the time scales of convection. The same scheme
can also be used for the temperature: If we want to model latent heat of melting, the temperature evolution
is controlled by the melting rate, and hence the temperature changes on the same time scale as the
reactions.
We here illustrate the way this operator splitting works using the simple example of exponential decay in a
stationary advection field. We will start with a model that has a constant initial temperature and composition and
no advection. The reactions for exponential decay
where is the initial
composition and is the
half life, are implemented in a shared library (benchmarks/operator_splitting/exponential_decay/exponential_decay.cc).
As we split the time-stepping of advection and reactions, there are now two different time steps in the model: We
control the advection time step using the ‘Maximum time step’ parameter (as the velocity is essentially 0, we can
not use the CFL number), and we set the reaction time step using the ‘Reaction time step’ parameter.
To illustrate convergence, we will vary both parameters in different model runs.
In our example, we choose ,
and specify this as initial condition using the function plugin for both composition and temperature. We also set
, which
is implemented as a parameter in the exponential decay material model and the exponential decay heating
model.
The complete parameter file for this setup can be found in benchmarks/operator_splitting/exponential_decay/exponential_decay.base.prm.
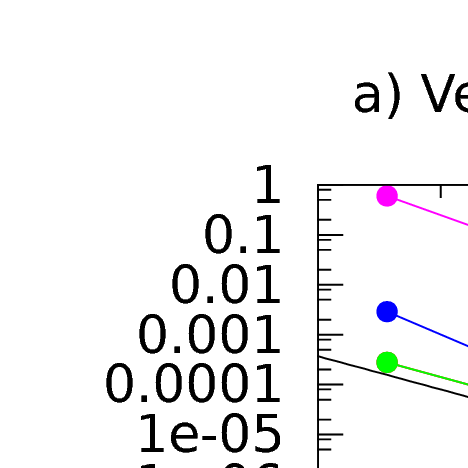
Figure 95 shows the convergence behavior of these models: As there is no advection, the advection time step does not
influence the error (blue data points). As we use a first-order operator split, the error is expected to converge linearly with the
reaction time step ,
which is indeed the case (red data points). Errors are the same for both composition and temperature, as both fields
have identical initial conditions and reactions, and we use the same methods to solve for these variables.
For the second benchmark case, we want to see the effect of advection on convergence. In order to do this, we
choose an initial temperature and composition that depends on x (in this case a sine), a decay rate that linearly
depends on z, and we apply a constant velocity in x-direction on all boundaries. Our new analytical solution for the
evolution of composition is now
is
the constant velocity, which we set to 0.01 m/s. The parameter file for this setup can be found in
benchmarks/operator_splitting/advection_reaction/advection_reaction.base.prm.
Figure 96 shows the convergence behavior in this second set of models: If we choose
the same resolution as in the previous example (left panel), for large advection time steps
the
error is dominated by advection, and converges with decreasing advection time step size (blue data points).
However, for smaller advection time steps, the error stagnates. The data series where the reaction time step varies
also shows a stagnating error. The reason for that is probably that our analytical solution is not in the finite element
space we chose, and so neither decreasing the advection or the reaction time step will improve the error. If we
increase the resolution by a factor of 4 (right panel), we see that that errors converge both with decreasing advection
and reaction time steps.
The results shown here can be reproduced using the bash scripts run.sh in the corresponding benchmark
folders.